RFж— зәҝжЁЎеқ—еҠ©еҠӣжү“йҖ жңәеҷЁдәәзҫӨжҺ§зі»з»ҹ
科жҠҖе§Ӣз»ҲжқҘиҮӘдәәжҖ§пјҢдёҖиҜӯйҒ“еҮә科еӯҰдёҺжҠҖжңҜзҡҶз”ұдәәзұ»зҡ„ж¬ІжңӣжүҖз”ҹгҖӮеңЁи®ІжұӮз»ҸжөҺж•ҲзӣҠдёҺж•ҲзҺҮзҡ„зҺ°д»ЈпјҢдәәзұ»иҝӣдёҖжӯҘж•ҙеҗҲи®Ўз®—жңәдёҺжңәеҷЁпјҢеҲӣйҖ жңәеҷЁдәәд»ҘжңҹиғҪеӨҹеўһеҠ е·ҘдҪңж•ҲзҺҮпјҢжҲ–жҳҜд»Јжӣҝдәәзұ»жү§иЎҢдёҖдәӣе…·еҚұйҷ©жҖ§зҡ„е·ҘдҪңпјҢеӣ жӯӨжңәеҷЁдәәзҡ„зӣёе…іжҠҖжңҜз ”еҸ‘е°Ҷдјҡи¶ҠжқҘи¶ҠеҸ—йҮҚи§ҶгҖӮ
жң¬ж–ҮжүҖејҖеҸ‘зҡ„жңәеҷЁдәәдҪңе“Ғд»ҘзӣӣзҫӨеҚҠеҜјдҪ“е…«дҪҚеҫ®жҺ§еҲ¶еҷЁ(MCU)дёәж ёеҝғпјҢе…·жңүи®ЎзЁӢгҖҒдҪҚзҪ®жҺЁз®—гҖҒзәўеӨ–зәҝдј ж„ҹйҒҝйҡңгҖҒдёӯж–ҮиҜӯйҹіжҸҗзӨәгҖҒең°зЈҒи§’еәҰжөӢйҮҸгҖҒең°зЈҒи§’еәҰдҝ®жӯЈзӯүеҠҹиғҪпјҢдҪҝз”ЁдёӘдәәи®Ўз®—жңә(PC)жҲ–笔记жң¬з”өи„‘(Notebook)еҪ“дҪңдё»жҺ§пјҢж’°еҶҷдәәжңәжҺҘеҸЈдё»жҺ§зЁӢеәҸпјҢд»Ҙе°„йў‘(RF)ж— зәҝжЁЎеқ—иҝӣиЎҢжІҹйҖҡпјҢдё»жҺ§и®Ўз®—жңәеҸҜдёӢиҫҫжҢҮд»Өз»ҷжңәеҷЁдәә并жҺҘ收жңәеҷЁдәәзҡ„зҠ¶жҖҒеӣһдј ж•°жҚ®гҖӮжң¬ж–Үи®ҫи®Ўзҡ„дё»йўҳжҳҜе°ҶжӯӨжңәеҷЁдәәзҫӨжҺ§зі»з»ҹеә”з”ЁдәҺдёӨз§ҚжңәеҷЁдәәйҳҹеҪўеҸҳжҚўпјҢеҲҶеҲ«жҳҜжЁӘзәөйҳҹеҪўеҸҳжҚўи·ҹеӣӣи§’дҪҚзҪ®йҳҹеҪўеҸҳжҚўгҖӮ
дё»жҺ§/еҸ—жҺ§зі»з»ҹжһ¶жһ„жҗӯиҪҪRFдј иҫ“
зӣ®еүҚ规еҲ’зҡ„зҫӨдҪ“жңәеҷЁдәәйҳҹеҪўеҸҳжҚўпјҢеҲқжӯҘеҲҶдёәдёӨз§ҚйҳҹеҪўпјҢйҳҹеҪў1дёәеӨҡжЁӘеҲ—дёҺзәөеҲ—йҳҹеҪўзҡ„дәӨжҚўпјҢйҳҹеҪў2дёәеҺҹжң¬дҪҚдәҺеӣӣдёӘи§’иҗҪзҡ„жңәеҷЁдәәеҒҡдҪҚзҪ®зҡ„еҸҳжҚўпјҢиҷҪ然дёӨз§ҚйҳҹеҪўзҡ„жҺ’зЁӢжңүдёҚе°Ҹзҡ„е·®ејӮжҖ§пјҢдҪҶе…¶зі»з»ҹжһ¶жһ„жҳҜзӣёеҗҢзҡ„пјҢеҸҜеҲҶдёәдё»жҺ§и®Ўз®—жңәз«ҜдёҺеҸ—жҺ§зҡ„зҫӨз»„жңәеҷЁдәәз«Ҝ(Slave)гҖӮ
еңЁжӯӨзҫӨдҪ“жңәеҷЁдәәзҡ„еҠЁдҪңе®Ңе…Ёз”ұдё»жҺ§з«ҜдёӢиҫҫе‘Ҫд»ӨиҖҢеҗҺеҠЁдҪңпјҢеҠЁдҪңжү§иЎҢе®ҢжҲҗпјҢйҡҸеҚіеҗ‘дё»жҺ§з«Ҝеӣһдј еҠЁдҪңзҠ¶жҖҒпјӣиҖҢдё»жҺ§з«ҜдҫқжҚ®жңәеҷЁдәәзҡ„еӣһдј зҠ¶жҖҒпјҢеҶізӯ–зҫӨдҪ“жңәеҷЁдәәзҡ„еҠЁдҪңпјҢе…¶ж•ҙдҪ“зҡ„жһ¶жһ„жЁЎејҸзҡҶеҰӮеӣҫ1жүҖзӨәпјҢе…¶и®Ўз®—жңәз«Ҝзҡ„зӣ‘жҺ§жҺҘеҸЈдёҺеҸ—жҺ§жңәеҷЁдәәз«Ҝзҡ„й—ҙзҡ„йҖҡдҝЎзҡҶжҳҜе»әз«ӢеңЁж— зәҝе°„йў‘йҖҡдҝЎе№іеҸ°дёҠпјҢ并且дҪҝз”ЁRS-232зҡ„йҖҡдҝЎеҚҸи®®пјҢйҖҡиҝҮжүҖй…ҚзҪ®зҡ„ж— зәҝз”өжЁЎеқ—nRF905д»Ҙж— зәҝе°„йў‘ж–№ејҸиҝӣиЎҢж•°жҚ®зҡ„дј иҫ“гҖӮ

еӣҫ1 зі»з»ҹжһ¶жһ„
ж— зәҝйҖҡдҝЎж»Ўи¶ідёІиЎҢдҝЎеҸ·дј иҫ“йңҖжұӮ
дё»жҺ§и®Ўз®—жңәз«Ҝзҡ„ж— зәҝдј иҫ“йғЁеҲҶпјҢдё»иҰҒжҳҜдҪҝз”ЁRS-232дёІиЎҢдј иҫ“дёҺж— зәҝRFжЁЎеқ—зҡ„RxDи„ҡдҪҚгҖҒTxDи„ҡдҪҚеҸҠе…ұең°и„ҡдҪҚиҝӣиЎҢж•°жҚ®дј иҫ“пјҢдё»жҺ§и®Ўз®—жңәз«ҜжңүдёӨз§Қж–№ејҸдёҺж— зәҝRFжЁЎеқ—иҝӣиЎҢдёІиЎҢдј иҫ“пјҢ第дёҖз§Қж–№ејҸ(еӣҫ2)пјҢеҪ“и®Ўз®—жңәRS-232дј иҫ“з«ҜеҸЈдёҚи¶іж—¶пјҢжҲ‘们еҸҜдҪҝз”Ёи®Ўз®—жңәз«Ҝзҡ„йҖҡз”ЁдёІиЎҢжҖ»зәҝ(USB)дј иҫ“еҹ пјҢз»Ҹз”ұIC PL2303жүҖи®ҫи®Ўзҡ„USBиҪ¬RS-232жЁЎеқ—пјҢе°ҶйҖҡиҝҮUSBеҚҸи®®дј иҫ“иҝӣжқҘзҡ„ж•°жҚ®пјҢиҪ¬жҚўдёәRS-232дёІиЎҢиҫ“еҮәдҝЎеҸ·пјҢеҶҚдёҺж— зәҝRFжЁЎеқ—зҡ„RxDи„ҡдҪҚиҝӣиЎҢйҖҡдҝЎж•°жҚ®дј йҖҒе’ҢTxDи„ҡдҪҚиҝӣиЎҢйҖҡдҝЎж•°жҚ®жҺҘ收пјҢеҸӘиҰҒжіЁж„ҸеҘҪеҪјжӯӨзҡ„дј иҫ“жіўзү№зҺҮ(Baud Rate)д»ҘеҸҠзӣёе…ійҖҡдҝЎеҚҸи®®жҳҜеҗҰдёҖиҮҙпјҢеҚіеҸҜз”ұдё»жҺ§и®Ўз®—жңәз«ҜдёӢиҫҫе‘Ҫд»ӨиҮіж— зәҝRFжЁЎеқ—жҲ–жҳҜжҺҘ收з”ұж— зәҝRFжЁЎеқ—еӣһдј зҡ„дҝЎеҸ·пјҢиҝӣиЎҢж— зәҝйҖҡдҝЎдј иҫ“пјӣ第дәҢз§Қж–№ејҸ(еӣҫ3)пјҢеҪ“и®Ўз®—жңәRS-232дј иҫ“з«ҜеҸЈи¶іеӨҹж—¶пјҢжҲ‘们дҪҝз”Ёи®Ўз®—жңәз«Ҝзҡ„RS-232дј иҫ“еҹ пјҢдёҚиҝҮеҹәдәҺж— зәҝRFжЁЎеқ—зҡ„дҝЎеҸ·еҮҶдҪҚдёә0дјҸзү№(V)жҲ–5дјҸзү№пјҢиҖҢи®Ўз®—жңәз«Ҝзҡ„RS-232зҡ„з”өеҺӢеҮҶдҪҚдёә+12дјҸзү№жҲ–-12дјҸзү№пјҢдёӨз«Ҝзҡ„з”өеҺӢеҮҶдҪҚдёҚдёҖиҮҙпјҢжүҖд»ҘйЎ»дҪҝз”ЁIC HIN232иҝӣиЎҢз”өеҺӢеҮҶдҪҚиҪ¬жҚўпјҢиҪ¬жҚўеҗҺд»ҚйЎ»жіЁж„ҸеҪјжӯӨзҡ„Baud Rateд»ҘеҸҠзӣёе…ійҖҡдҝЎеҚҸи®®жҳҜеҗҰдёҖиҮҙпјҢжүҚиғҪиҫҫжҲҗRS-232дёІиЎҢйҖҡдҝЎдј иҫ“гҖӮ
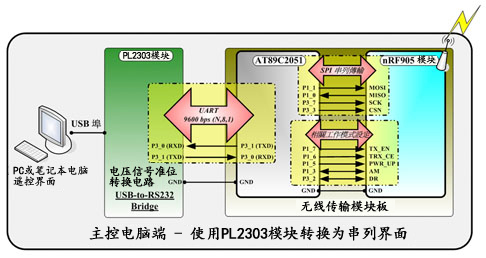
еӣҫ2 и®Ўз®—жңәз«ҜйҖҡдҝЎжһ¶жһ„-1

еӣҫ3 и®Ўз®—жңәз«ҜйҖҡдҝЎжһ¶жһ„-2
ж–№еҗ‘дј ж„ҹжҸҗеҚҮжңәеҷЁдәәи·Ҝеҫ„и®ҫи®ЎзІҫеҮҶеәҰ
и®ҫи®ЎзҫӨжҺ§жңәеҷЁдәәи·Ҝеҫ„规еҲ’зі»з»ҹеүҚ(д»ҘдёӢз®Җз§°зҫӨжҺ§жңәеҷЁдәәзі»з»ҹ)пјҢйҰ–е…Ҳе°ҶжҸҗеҚҮе°ҸжңәеҷЁдәәжүҖе…·еӨҮзҡ„иғҪеҠӣпјҢеҢ…еҗ«ж–№еҗ‘дј ж„ҹиғҪеҠӣ(еҠ е…Ҙз”өеӯҗзҪ—зӣҳдј ж„ҹең°зЈҒи§’еәҰ)гҖҒй—ӘйҒҝйҡңзўҚзү©иғҪеҠӣгҖҒиҜӯйҹіжҸҗзӨәиғҪеҠӣ(е…·дҪ“иҜӯйҹіжҸҗжҠҘеҠҹиғҪд»Ҙе‘ҠзҹҘе‘Ҫд»ӨдёӢиҫҫиҖ…)гҖҒжңәеҷЁдәәиЎҢиө°и·Ҝеҫ„и®Ўз®—иғҪеҠӣ(иЎҢиө°жңҹжңӣи·қзҰ»жҲ–и®Ўз®—еҮәе·ІиЎҢиө°зҡ„и·қзҰ»й•ҝеәҰ)пјҢд»ҘеҸҠеҠЁдҪңе®ҢжҲҗж•°жҚ®еӣһдј иғҪеҠӣ(еҲ©дәҺи®Ўз®—жңәз«ҜеҜ№жңәеҷЁдәәзҫӨзҡ„ж•ҙдҪ“зӣ‘жҺ§)зӯүпјҢдҪҝжңәеҷЁдәәжң¬иә«зҡ„еҹәжң¬еҠҹиғҪжӣҙз¬ҰеҗҲи·Ҝеҫ„规еҲ’зҡ„еҠҹиғҪиҰҒжұӮгҖӮ
и®Ўз®—жңәз«Ҝзҡ„зӣ‘жҺ§жҺҘеҸЈжҳҜд»ҘдёҖдёӘж— зәҝйҖҡдҝЎжЁЎеқ—пјҢеҜ№еӨҡеҸ°жңәеҷЁдәәдёӢиҫҫе‘Ҫд»ӨпјҢеңЁжӯӨжһ¶жһ„дёӢпјҢеҰӮдҪ•и®©зӣ‘жҺ§жҺҘеҸЈеҸҜд»ҘеҜ№зҫӨжҺ§жңәеҷЁдәәз«Ҝзҡ„жҺҢжҸЎжӣҙе…·дҫҝеҲ©дёҺзҒөжҙ»жҖ§пјҢеҖҹд»ҘеҜ№зҫӨжҺ§жңәеҷЁдәәзҡ„и·Ҝеҫ„规еҲ’еёҰжқҘеё®еҠ©пјҢжң¬зі»з»ҹе°ҶйҖҡиҝҮеҜ№еҠЁдҪңе‘Ҫд»Өж•°жҚ®зј–з Ғзҡ„ж–№ејҸпјҢиҝӣдёҖжӯҘе°ҶжңәеҷЁдәәз«Ҝзҡ„еҠЁдҪң规еҲ’дёәеҚ•дёӘиҝҗеҠЁжЁЎејҸгҖҒеӨҡдёӘиҝҗеҠЁжЁЎејҸдёҺеҗҢжӯҘиҝҗеҠЁжЁЎејҸгҖӮ
еҚ•дёӘиҝҗеҠЁжЁЎејҸзҡ„еҠЁдҪңж„Ҹд№үдёәеҗ„еҸёе…¶иҒҢпјҢеҒҮи®ҫиҜҘеҸ°жңәеҷЁдәәжҺҘ收еҲ°еҠЁдҪңиҰҒжұӮж—¶пјҢз«ӢеҚіжү§иЎҢе…¶еҠЁдҪңе‘Ҫд»ӨпјӣеӨҡдёӘиҝҗеҠЁжЁЎејҸзҡ„еҠЁдҪңж„Ҹд№үдёәзҫӨдҪ“жңәеҷЁдәәеңЁеҗҢдёҖж—¶й—ҙзӮ№еҗҜеҠЁе№¶дё”еҒҡзӣёеҗҢеҠЁдҪңпјӣеҗҢжӯҘеҠЁдҪңжЁЎејҸзҡ„еҠЁдҪңж„Ҹд№үдёҺеҚ•дёӘиҝҗеҠЁжЁЎејҸзҡ„ж„Ҹд№үзұ»дјјпјҢе·®ејӮеңЁжңәеҷЁдәәжҺҘ收еҲ°еҠЁдҪңе‘Ҫд»Өж—¶пјҢ并дёҚз«ӢеҚіжү§иЎҢе‘Ҫд»ӨиҰҒжұӮпјҢеҝ…йЎ»зӯүеҫ…еҸҰдёҖеҗҢжӯҘеҗҜеҠЁе‘Ҫд»ӨпјҢиҖҢеҗҺеҶҚеҗҢж—¶еҗҜеҠЁе№¶жү§иЎҢиҜҘжңәеҷЁдәәе·ІжҺҘ收зҡ„е‘Ҫд»ӨеҠЁдҪңгҖӮ
ж„ҹе…үжЁЎеқ—/з”өеӯҗзҪ—зӣҳеҚҸеҠ©еҲӨж–ӯиЎҢеҫ„ж–№еҗ‘
еҰӮеӣҫ4жүҖзӨәпјҢдёәжңәеҷЁдәәзҡ„ж•ҙдҪ“жһ¶жһ„еӣҫпјҢзҺҜеўғдј ж„ҹеҷЁж–№йқўжңүж„ҹе…үжЁЎеқ—дёҺз”өеӯҗзҪ—зӣҳжЁЎеқ—пјҢдҪҝеҫ—жңәеҷЁдәәе…·жңүж–№еҗ‘дј ж„ҹзҡ„иғҪеҠӣпјҢиҝҷе°ҶдёәжңәеҷЁдәәеңЁи·Ҝеҫ„规еҲ’дёҠпјҢеёҰжқҘеҫҲеӨ§зҡ„её®еҠ©пјӣиҖҢи®ЎзЁӢдј ж„ҹеҷЁзҡ„Encoderи„үжіўдҝЎеҸ·зІҫеәҰиҫҫеҲ°0.185е…¬еҲҶзҡ„дј ж„ҹеҚ•дҪҚпјҢжҸҗеҚҮдәҶи·Ҝеҫ„规еҲ’зҡ„зІҫзЎ®жҖ§пјҢеҸҰеӨ–зәўеӨ–зәҝйҒҝйҡңжЁЎеқ—еҸҜд»ҘеҲӨж–ӯйҡңзўҚзү©пјҢд»ҘеҸҠжҳҜеҗҰеҲ°иҫҫжЈӢзӣҳејҸе®һйӘҢе№іеҸ°зҡ„дәӨзӮ№гҖӮ
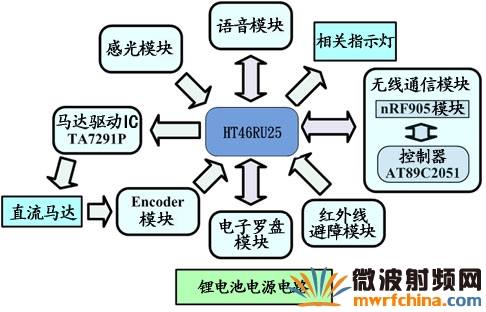
еӣҫ4 жңәеҷЁдәәж•ҙдҪ“жһ¶жһ„
еӣҫ5дёәзҫӨжҺ§жңәеҷЁдәәзі»з»ҹзҡ„дәәжңәжҺҘеҸЈпјҢжӯӨзӣ‘жҺ§жҺҘеҸЈжҳҜдҪҝз”Ёе®қе…°(Borland)C++ BuilderжүҖж’°еҶҷи®ҫи®ЎпјҢеҲ©з”ЁжӯӨдәәжңәжҺҘеҸЈе°ұеҸҜеҜ№зі»з»ҹдёӯзҡ„жңәеҷЁдәәдёӢиҫҫе‘Ҫд»ӨпјҢдё”еҪ“жңәеҷЁдәәжү§иЎҢе®Ңи®Ўз®—жңәз«ҜжүҖдёӢиҫҫзҡ„е‘Ҫд»ӨеҗҺпјҢдјҡе°Ҷжү§иЎҢз»“жһңеӣһдј з»ҷжӯӨзӣ‘жҺ§жҺҘеҸЈпјҢиҫҫжҲҗжңәеҷЁдәәзҫӨдҪ“зӣ‘жҺ§зҡ„зӣ®зҡ„гҖӮ
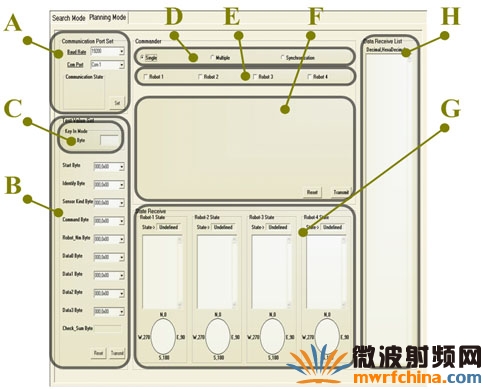
еӣҫ5 зҫӨжҺ§жңәеҷЁдәәзі»з»ҹдәәжңәжҺҘеҸЈ
жҺҘдёӢжқҘз”ұеӣҫдёӯжүҖж ҮзӨәзҡ„зј–еҸ·пјҢйҖҗдёҖеҒҡиҜҙжҳҺпјҢзј–еҸ·Aдёәи®Ўз®—жңәз«ҜдёҺж— зәҝRFйҖҡдҝЎжЁЎеқ—зҡ„йҖҡдҝЎз«ҜеҸЈеҜ№еә”и®ҫе®ҡпјҢи®ҫе®ҡеҶ…е®№еҢ…еҗ«RS-232йҖҡдҝЎз«ҜеҸЈйҖүжӢ©дёҺBaud RateйҖүжӢ©пјҢеӣ дёәи®Ўз®—жңәз«Ҝзҡ„дәәжңәжҺҘеҸЈжҳҜд»ҘRS-232еҜ№еӨ–еҒҡжІҹйҖҡпјҢеӣ жӯӨеҠЎеҝ…е…Ҳи®ҫе®ҡжӯӨйғЁеҲҶпјҢжүҚиғҪеҗҜеҠЁдәәжңәжҺҘеҸЈзҡ„еҗ„йЎ№еҜ№еӨ–ж•°жҚ®дј иҫ“еҠЁдҪңпјӣзј–еҸ·BжҸҗдҫӣж“ҚдҪңиҖ…иҮӘиЎҢйҖүжӢ©жүҖиҰҒдј иҫ“зҡ„ж•°жҚ®з»„еҗҲпјҢдё”д№ҹеҸҜдҪҝз”Ёзј–еҸ·Cзҡ„й”®зӣҳиҫ“е…ҘжЁЎејҸпјҢзЎ®е®ҡеҘҪиҰҒдј еҮәзҡ„ж•°жҚ®еҗҺпјҢжҢүдёӢдј йҖҒй”®пјҢеҚійҖҒеҮәж•°жҚ®гҖӮ
зј–еҸ·DдёәжңәеҷЁдәәеҚ•дёӘгҖҒеӨҡдёӘгҖҒеҗҢжӯҘеҠЁдҪңжЁЎејҸзҡ„йҖүжӢ©еҢәпјҢеҪ“йҖүжӢ©еҚ•дёӘжҲ–еҗҢжӯҘиҝҗеҠЁжЁЎејҸж—¶пјҢзј–еҸ·EеҢәеқ—жүҚдјҡжҳҫзҺ°пјҢеҺҹеӣ дёәеӨҡдёӘиҝҗеҠЁжЁЎејҸдёӢпјҢ并дёҚйЎ»иҰҒеҲӨеҲ«жҳҜе“ӘеҸӘжңәеҷЁдәәиҜҘжҺҘ收еҠЁдҪңе‘Ҫд»Өж•°жҚ®пјҢжүҖд»ҘеҸӘйЎ»дёӢиҫҫдёҖз»„е‘Ҫд»ӨпјҢд№ҹеӣ жӯӨзј–еҸ·FйғЁеҲҶеҸӘдјҡеҮәзҺ°дёҖз»„е‘Ҫд»ӨйҖүжӢ©зӘ—еҸЈпјӣзј–еҸ·Fдёәеҗ„зј–еҸ·жңәеҷЁдәәзҡ„е‘Ҫд»ӨдёӢиҫҫйҖүжӢ©еҢәеҹҹпјӣзј–еҸ·GеҢәеқ—дёәеҗ„жңәеҷЁдәәзҡ„еӣһдј ж•°жҚ®зҠ¶жҖҒжҳҫзӨәдёҺз»ҹи®ЎеҢәпјҢ然иҖҢзҫӨжҺ§жңәеҷЁдәәзі»з»ҹпјҢзӣ®еүҚдҪҝз”ЁеӣӣеҸ°жңәеҷЁдәәпјҢеӣ жӯӨпјҢ规еҲ’дәҶеӣӣз»„дёӘеҲ«жҳҫзӨәеҢәеҹҹпјҢдёәRobot-1 StateпҪһRobot-4 Stateпјӣзј–еҸ·HеҢәеқ—дёәжҳҫзӨәпјҢи®Ўз®—жңәз«ҜжүҖжҺҘ收еҲ°жқҘиҮӘдәҺжңәеҷЁдәәз«Ҝеӣһдј зҡ„жүҖжңүж•°жҚ®гҖӮ
и·Ҝеҫ„дҝ®жӯЈ/йҒҝйҡңдҫҰжөӢ/е‘Ҫд»ӨжҺҘ收иҪҜ件дёҚеҸҜжҲ–зјә
зҫӨжҺ§жңәеҷЁдәәзі»з»ҹзҡ„жңәеҷЁдәәиҪҜ件и®ҫи®ЎпјҢе…·еӨҮеҠҹиғҪеҢ…еҗ«дҪҝжңәеҷЁдәәеҲ©дәҺйҳҹеҪўеҸҳжҚўеә”з”Ёзҡ„и·Ҝеҫ„规еҲ’дёҠеҰӮеҚ•дёӘгҖҒеӨҡдёӘгҖҒеҗҢжӯҘиҝҗеҠЁжЁЎејҸеҠҹиғҪгҖӮдҫқи®Ўз®—жңәз«Ҝзӣ‘жҺ§жҺҘеҸЈжүҖи®ҫе®ҡзҡ„иҝҗеҠЁйҮҸпјҢжү§иЎҢеүҚиҝӣгҖҒеҸіж—ӢгҖҒеҗҺйҖҖгҖҒеҸіж—ӢзӯүеҠЁдҪңпјҢдё”еүҚиҝӣж—¶е…·жңүйҒҝйҡңеҠҹиғҪгҖӮдҫқи®Ўз®—жңәз«Ҝзӣ‘жҺ§жҺҘеҸЈжүҖи®ҫе®ҡзҡ„иҝҗеҠЁйҮҸпјҢ并дҫқжҚ®и„үеҶІе®ҪеәҰи°ғеҸҳеҷЁ(PWM)йҖҹеәҰеҸӮж•°пјҢжү§иЎҢеүҚиҝӣгҖҒеҸіж—ӢгҖҒеҗҺйҖҖгҖҒе·Ұж—ӢзӯүеҠЁдҪңпјҢдё”еүҚиҝӣж—¶пјҢжңәеҷЁдәәе…·еӨҮзӣҙзәҝеүҚиҝӣзҡ„дҝ®жӯЈеҠҹиғҪгҖӮ
и®ҫи®ЎеҸҜдҫқи®Ўз®—жңәз«Ҝзӣ‘жҺ§жҺҘеҸЈзҡ„е‘Ҫд»ӨпјҢжү§иЎҢеүҚиҝӣгҖҒеҸіж—ӢгҖҒеҗҺйҖҖгҖҒе·Ұж—ӢзӯүеҠЁдҪңпјҢ并且计算其жҖ»еҠЁдҪңйҮҸгҖӮжңәеҷЁдәәйқўеҗ‘и§’еәҰжөӢйҮҸ(з”өеӯҗзҪ—зӣҳдј ж„ҹ)гҖӮжңәеҷЁдәәйқўеҗ‘и§’еәҰдҝ®жӯЈеҠҹиғҪ(дҫқжҚ®з”өеӯҗзҪ—зӣҳзҡ„дј ж„ҹеҖј)гҖӮиҜӯйҹіжҸҗзӨәеҠҹиғҪпјҢжү§иЎҢе®ҢдёҠиҝ°зҡ„еҠЁдҪңеҗҺпјҢзҡҶдјҡиҜӯйҹіжҸҗзӨәзӣёе…ізҠ¶жҖҒгҖӮзҠ¶жҖҒеӣһдј пјҢжү§иЎҢе®Ңе‘Ҫд»ӨеҗҺпјҢзҡҶдјҡдј йҖҒеҮәзӣёе…іж•°жҚ®иҮіи®Ўз®—жңәз«Ҝзӣ‘жҺ§жҺҘеҸЈгҖӮ
жҺҢжҸЎзҫӨжҺ§жңәеҷЁдәәеҹәжң¬иҝҗеҠЁгҖҖжңүж•ҲиҫҫжҲҗи·Ҝеҫ„规еҲ’жөӢиҜ•
жӯӨе®һйӘҢзӣ®зҡ„дёәжөӢиҜ•зҫӨжҺ§жңәеҷЁдәәи·Ҝеҫ„规еҲ’зҡ„зӣ‘жҺ§жҺҘеҸЈпјҢжҳҜеҗҰиғҪйЎәеҲ©еҜ№еӣӣеҸ°дёҚеҗҢзј–еҸ·жңәеҷЁдәәдёӢиҫҫе·ҘдҪңе‘Ҫд»Ө(еҢ…еҗ«еҚ•дёӘгҖҒеӨҡдёӘгҖҒеҗҢжӯҘиҝҗеҠЁзӯүжЁЎејҸдёӢзҡ„жңәеҷЁдәәеҠҹиғҪжөӢиҜ•)пјҢдё”жөӢиҜ•жӯӨжҺҘеҸЈжҳҜеҗҰеҸҜжӯЈзЎ®зҡ„жҳҫзӨәдёҺз»ҹи®ЎеҮәеҗ„жңәеҷЁдәәиҝҗеҠЁзҡ„дҝЎжҒҜпјҢиҝҷдәӣжӯҘйӘӨеҜ№дәҺзҫӨжҺ§жңәеҷЁдәәзҡ„и·Ҝеҫ„规еҲ’жҳҜеҝ…йЎ»зҡ„пјҢиғҪжҺҢжҸЎжңәеҷЁдәәзҡ„еҠЁдҪңзҠ¶жҖҒпјҢжүҚиғҪжңүж•Ҳзҡ„规еҲ’зҫӨжҺ§жңәеҷЁдәәзҡ„и·Ҝеҫ„гҖӮ
еҰӮеӣҫ6жүҖзӨәе°ҶеӣӣеҸ°жңәеҷЁдәәж”ҫзҪ®еңЁжЎҢйқўпјҢз”ұе·ҰиҮіеҸіпјҢжңәеҷЁдәәзҡ„зј–еҸ·дёә1пҪһ4еҸ·пјҢжҺҘдёӢжқҘйҖҗдёҖеҜ№жңәеҷЁдәәдёӢиҫҫеҠЁдҪңе‘Ҫд»ӨгҖӮеҹәдәҺдёҠиҝ°зҡ„еҚ•дёӘиҝҗеҠЁжЁЎејҸжөӢиҜ•пјҢйӘҢиҜҒдәҶе·ІеҸҜз”ұи®Ўз®—жңәз«Ҝзҡ„зӣ‘жҺ§жҺҘеҸЈпјҢзӣ‘жҺ§еҗ„жңәеҷЁдәәзҡ„иҝҗеҠЁзҠ¶жҖҒгҖӮ
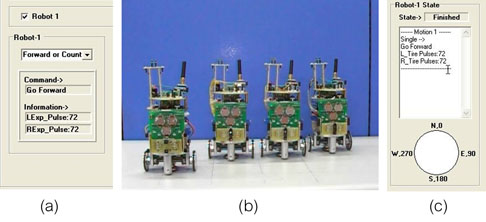
еӣҫ6 еҚ•дёӘиҝҗеҠЁжЁЎејҸеҠЁдҪңжөӢиҜ•гҖӮ(a)дёәзӣ‘жҺ§жҺҘеҸЈдј еҮәзҡ„еҠЁдҪңе‘Ҫд»Өз»„еҗҲпјҢ(b)дёәжңәеҷЁдәәжү§иЎҢе‘Ҫд»ӨеҠЁдҪңеҗҺзӣёеҜ№дҪҚзҪ®пјҢ(c)дёәжңәеҷЁдәәе®ҢжҲҗеҠЁдҪңеҗҺзҡ„зҠ¶жҖҒеӣһдј гҖӮ
жЁӘйҳҹеҸҳзәөйҳҹ/и§’зәҝеҸҳжҚўжҳ“еҰӮеҸҚжҺҢ
ж¬ІдҪҝеӣӣеҸ°жңәеҷЁдәәз”ұеӣҫ7(a)жүҖзӨәзҡ„жЁӘйҳҹйҳҹеҪўпјҢеҸҳжҚўжҲҗеӣҫ7(e)зҡ„зәөйҳҹйҳҹеҪўпјҢдҫқиЎЁ1зҡ„еҗҢжӯҘе‘Ҫд»Өж•°жҚ®пјҢйҖҗдёҖз”ұзӣ‘жҺ§жҺҘеҸЈдёӢиҫҫпјҢеҰӮеӣҫ7(a)пҪһ(e)жүҖзӨәпјҢжңәеҷЁдәәзҫӨе°ҶйҖҗжӯҘе®ҢжҲҗпјҢз”ұжЁӘйҳҹеҸҳжҲҗзәөйҳҹзҡ„и·Ҝеҫ„规еҲ’(е…¶жҜҸдёӘжӯҘйӘӨйғҪдёәеҗҢжӯҘеҠЁдҪңжЁЎејҸпјҢеӣ жӯӨжҜҸдёӘжӯҘйӘӨзҡҶжҳҜеҗҢж—¶еҗҜеҠЁиҖҢжү§иЎҢзҡ„)пјҢиҖҢе®ҢжҲҗжӯӨи·Ҝеҫ„规еҲ’зҡ„зҠ¶жҖҒеӣһдј пјҢеҲҷеҰӮеӣҫ8жүҖзӨәпјҢеҢ…еҗ«жңәеҷЁдәә收еҲ°еҗҢжӯҘж•°жҚ®зҡ„еӣһдј жңәеҲ¶гҖӮеӣ жӯӨпјҢйӘҢиҜҒдәҶдҪҝз”ЁзҫӨжҺ§жңәеҷЁдәәи·Ҝеҫ„规еҲ’зі»з»ҹзҡ„еҗҢжӯҘе‘Ҫд»ӨжЁЎејҸпјҢйҖҗж¬ЎдёӢиҫҫеҠЁдҪңе‘Ҫд»ӨпјҢеҸҜдҪҝжңәеҷЁдәәзҫӨз”ұжЁӘйҳҹйҳҹеҪўеҸҳжҚўдёәзәөйҳҹйҳҹеҪўзҡ„и·Ҝеҫ„规еҲ’пјҢеңЁжӯӨи®ҫи®ЎиҖ…е°ҪйҮҸд»ҘжңҖзҹӯиҝҗеҠЁйҮҸе®ҢжҲҗжүҖиҰҒзҡ„йҳҹеҪўеҸҳжҚўгҖӮ
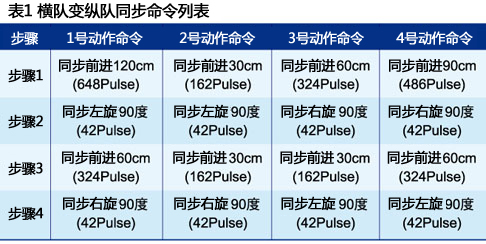
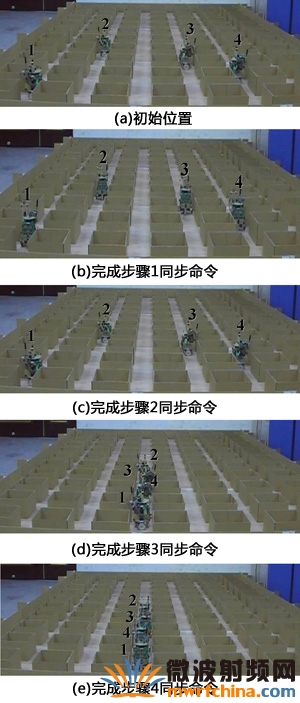
еӣҫ7 жЁӘйҳҹеҸҳзәөйҳҹи·Ҝеҫ„规еҲ’

еӣҫ8 жЁӘйҳҹеҸҳзәөйҳҹзҠ¶жҖҒеӣһдј
ж¬ІдҪҝеӣӣеҸ°жңәеҷЁдәәз”ұеӣҫ9(a)жүҖзӨәзҡ„еҲқе§ӢдҪҚзҪ®пјҢеҒҡеҜ№и§’зәҝдҪҚзҪ®еҸҳжҚўжҲҗеӣҫ9(h)зҡ„жңҖз»ҲдҪҚзҪ®пјҢеҸҜдҫқиЎЁ2зҡ„еӨҡдёӘдёҺеҗҢжӯҘе‘Ҫд»Өж•ҙеҗҲж•°жҚ®пјҢйҖҗдёҖз”ұзӣ‘жҺ§жҺҘеҸЈдёӢиҫҫпјҢеҲҷеҰӮеӣҫ9(a)пҪһ(h)жүҖзӨәпјҢжңәеҷЁдәәзҫӨе°ҶйҖҗжӯҘе®ҢжҲҗпјҢеҜ№и§’зәҝдәӨеҸүеҸҳжҚўйҳҹеҪў(е…¶жҜҸдёӘжӯҘйӘӨйғҪдёәеӨҡдёӘжҲ–еҗҢжӯҘеҠЁдҪңжЁЎејҸпјҢеӣ жӯӨпјҢжҜҸдёӘжӯҘйӘӨзҡҶжҳҜеҗҢж—¶еҗҜеҠЁе№¶жү§иЎҢзҡ„)пјҢиҖҢе®ҢжҲҗжӯӨи·Ҝеҫ„规еҲ’зҡ„зҠ¶жҖҒеӣһдј пјҢиҜҰи§Ғеӣҫ10зҡ„еҗ„жқЎеҲ—ж–№еқ—гҖӮ
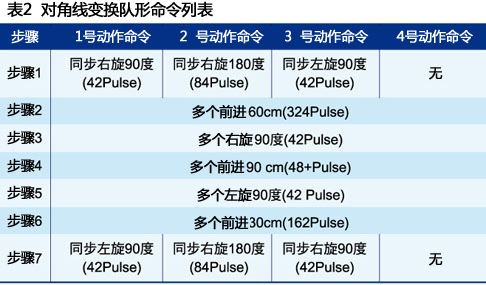

еӣҫ9 еҜ№и§’зәҝеҸҳжҚўйҳҹеҪў
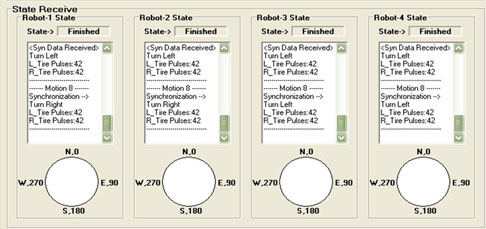
еӣҫ10 еҜ№и§’зәҝеҸҳжҚўйҳҹеҪўзҠ¶жҖҒеӣһдј
йӘҢиҜҒдәҶдҪҝз”ЁзҫӨжҺ§жңәеҷЁдәәи·Ҝеҫ„规еҲ’зі»з»ҹзҡ„еӨҡдёӘдёҺеҗҢжӯҘе‘Ҫд»ӨжЁЎејҸпјҢйҖҗж¬ЎдёӢиҫҫеҠЁдҪңе‘Ҫд»ӨпјҢеҸҜдҪҝжңәеҷЁдәәзҫӨеҒҡеҜ№и§’зәҝеҸҳжҚўдҪҚзҪ®зҡ„и·Ҝеҫ„规еҲ’гҖӮ
зӣ®еүҚеӨҡжңәеҷЁдәәзҡ„и·Ҝеҫ„规еҲ’еҸҜеҪ’зұ»дёәдёӨеӨ§ж–№еҗ‘пјҢе…¶дёҖдёәз”ұи®Ўз®—жңәз«Ҝзӣ‘жҺ§жҺҘеҸЈпјҢе®Ңе…Ёзӣ‘жҺ§жңәеҷЁдәәзҡ„иҝҗеҠЁиЎҢдёәпјҢеҢ…еҗ«и®Ўз®—жңәз«ҜеҜ№жңәеҷЁдәәз«Ҝзҡ„е‘Ҫд»ӨдёӢиҫҫпјҢд»ҘеҸҠжңәеҷЁдәәз«Ҝжү§иЎҢе®Ңе‘Ҫд»Өзҡ„зҠ¶жҖҒеӣһдј пјҢз§°дёәеӨҡжңәеҷЁдәәи·Ҝеҫ„规еҲ’зі»з»ҹгҖӮ
з»Ҹе®һйҷ…жөӢиҜ•пјҢдё”зЎ®е®ҡжңәеҷЁдәәжң¬иә«зҡ„еҠҹиғҪжӯЈеёёеҗҺпјҢиҝӣдёҖжӯҘж•ҙеҗҲзӣ‘жҺ§жҺҘеҸЈеҒҡжөӢиҜ•пјҢеҸ‘зҺ°е·Із»ҸеҸҜд»ҘйЎәеҲ©еҜ№еӨҡжңәеҷЁдәәз«ҜдёӢиҫҫеҚ•дёӘгҖҒеӨҡдёӘд»ҘеҸҠеҗҢжӯҘиҝҗеҠЁжЁЎејҸзӯүжҺ§еҲ¶пјҢ并且жҸҗеҮәеҲ©з”ЁеӨҡдёӘдёҺеҗҢжӯҘиҝҗеҠЁжЁЎејҸпјҢз”ұзӣ‘жҺ§жҺҘеҸЈеҜ№жңәеҷЁдәәзҫӨдёӢиҫҫе‘Ҫд»ӨпјҢжү§иЎҢйҳҹеҪўеҸҳжҚўзҡ„и·Ҝеҫ„规еҲ’ж–№ејҸпјҢеҰӮпјҡжЁӘйҳҹеҸҳзәөйҳҹпјҢеҖҹд»ҘйӘҢиҜҒжӯӨзі»з»ҹзҡ„зЁіе®ҡжҖ§пјҢ并且еҸҜдҪңдёәеҗҺз»ӯеӨҡжңәеҷЁдәәи·Ҝеҫ„规еҲ’延伸е®һйӘҢзҡ„еҹәзЎҖзі»з»ҹгҖӮ
дҪңиҖ…пјҡиҗ§иғңж–ҮгҖҒеј еҝ—йёҝгҖҒжқҺжҹҸжҜ…гҖҒиӢҸеӣҪеІҡпјҢзӣӣзҫӨеҚҠеҜјдҪ“
 зІӨе…¬зҪ‘е®үеӨҮ 44030902003195еҸ·
зІӨе…¬зҪ‘е®үеӨҮ 44030902003195еҸ·