йӣ¶еҹәзЎҖе…Ҙй—ЁжҷәиғҪе°„йў‘---pythonзҡ„ж— дәәжңәжөӢеҗ‘еӨ©зәҝиҮӘеҠЁеҢ–и®ҫи®Ў
еүҚиЁҖ
еӨҡж—Ӣзҝјж— дәәжңәе…·жңүзҺҜдҝқгҖҒеҷӘйҹіе°ҸгҖҒдҪ“з§Ҝе°ҸгҖҒйҮҚйҮҸиҪ»гҖҒжҲҗжң¬дҪҺгҖҒжҗәеёҰж–№дҫҝпјҢе…·жңүйҖҹеәҰеҸҜжҺ§гҖҒеһӮзӣҙиө·йҷҚгҖҒзІҫеҮҶжӮ¬еҒңзӯүдјҳеҠҝпјҢе·ІеңЁж°‘з”ЁйўҶеҹҹпјҢж— дәәжңәеңЁеҶңжһ—жӨҚдҝқгҖҒжҠўйҷ©ж•‘зҒҫгҖҒзү©жөҒиҝҗиҫ“гҖҒе®үйҳІе·ЎжЈҖзӯүж–№йқўеҸ‘жҢҘдәҶйҮҚиҰҒдҪңз”ЁпјӣеҗҢж—¶еңЁеҶӣз”ЁйўҶеҹҹпјҢж— дәәжңәеӣ жӢҘжңүй«ҳз©әгҖҒй«ҳйҖҹгҖҒйҡҗиә«гҖҒй•ҝиҲӘж—¶зӯүзү№жҖ§пјҢеңЁжҲҳеңәзӣ‘и§ҶгҖҒжғ…жҠҘжҗңйӣҶгҖҒз”өеӯҗдҫҰеҜҹгҖҒжҢҮжҺ§йҖҡдҝЎгҖҒз”өеӯҗж”»еҮ»гҖҒзҒ«еҠӣжү“еҮ»зӯүйўҶеҹҹжүҝжӢ…иө·и¶ҠжқҘи¶ҠйҮҚиҰҒзҡ„д»»еҠЎгҖӮ

еӣҫ1 еӨҡж—Ӣзҝјж— дәәжңә
дёҺжӯӨеҗҢж—¶пјҢйҡҸзқҖеҗ„з§Қж“Қзәөж–№дҫҝзҡ„йҒҘжҺ§зӣҙеҚҮжңәгҖҒеӨҡж—ӢзҝјйЈһиЎҢеҷЁж—Ҙжёҗжҷ®еҸҠпјҢ“й»‘йЈһ”ж— дәәжңәе№Іжү°иҲӘз©ә秩еәҸзӯүж„ҸеӨ–дәӢ件频еҸ‘пјҢеҜ№йҮҚиҰҒең°еҹҹе®үе…ЁдҝқеҚ«гҖҒжІ»е®үз®ЎзҗҶзӯүжһ„жҲҗдәҶдёҘеі»жҢ‘жҲҳпјҢеј•еҸ‘еҗ„еӣҪеҜ№еҸҚж— дәәжңәзі»з»ҹзҡ„й«ҳеәҰе…іжіЁгҖӮжҜ”еҰӮпјҢеӣҪ家зҰҒйЈһеҢәеҹҹеҢ…жӢ¬пјҡжүҖжңүж”ҝеәңжңәжһ„дёҠз©әгҖҒжүҖжңүеҶӣдәӢеҚ•дҪҚдёҠз©әгҖҒж”ҝеәңжү§жі•зҺ°еңәгҖҒзҒ«иҪҰз«ҷгҖҒжұҪиҪҰз«ҷе№ҝеңәзӯүдәәжөҒеҜҶйӣҶең°ж–№гҖҒеҚұйҷ©зү©е“Ғе·ҘеҺӮгҖҒд»“еә“зӯүгҖӮ
иҷҪ然йғЁеҲҶж— дәәжңәдјҒдёҡеңЁе…¶дә§е“Ғдёӯдёәж— дәәжңәйЈһиЎҢеҲ’е®ҡдәҶзҰҒйЈһеҢәеҹҹзҰҒжӯўйЈһиЎҢпјҢдҪҶж— дәәжңәй…Қ件еңЁзҪ‘дёҠд№°еҚ–зҡ„й—Ёж§ӣеҫҲдҪҺпјҢеҫҲе®№жҳ“е°ұиғҪеӨҹз»„иЈ…дёҖеҸ°иғҪеӨҹйЈһиЎҢзҡ„ж— дәәжңәгҖӮеҠ д№ӢеӨҡж•°ж— дәәжңәз”ЁжҲ·еңЁжІЎжңүз»ҸиҝҮеҹәзЎҖзҡ„йЈһиЎҢеҸҠе®үе…Ёеҹ№и®ӯпјҢе°ұеңЁеҗ„з§ҚзҰҒйЈһеҢәеҹҹйЈһж— дәәжңәпјҢеҪұе“Қж°‘иҲӘе®үе…ЁгҖҒзӮёжңәгҖҒдјӨдәәзӯүдәӢ件频з№ҒеҮәзҺ°гҖӮ
еӣ жӯӨпјҢж— дәәжңәзҡ„е®үе…ЁйҳІиҢғе’Ңз®ЎжҺ§пјҢе·Із»ҸжҲҗдёәж— дәәжңәиЎҢдёҡзҡ„йҮҚзӮ№еҶ…е®№гҖӮж— дәәжңәжҺўжөӢи§ЈеҶіж–№жЎҲе·Із»ҸеҸҳеҫ—йқһеёёйҮҚиҰҒгҖӮеҸҜеҜ№ж— дәәжңәиҝӣиЎҢж— зәҝз”өдҝЎеҸ·дҫҰжөӢпјҢе®һзҺ°ж— дәәжңәзҡ„ж— зәҝз”өжөӢеҗ‘гҖӮ


еӣҫ2 ж— дәәжңәдҫҰжөӢзі»з»ҹ
жөӢеҗ‘еӨ©зәҝйҳө
ж— дәәжңәжөӢеҗ‘еӨ©зәҝйҳөжҢүз…§йҮҮз”Ёзҡ„жөӢеҗ‘жҺҘ收жңәдёҚеҗҢпјҢеҸҜд»ҘеҲҶдёәд»ҘдёӢдёӨз§Қпјҡ
-
еҚ•йҖҡйҒ“жөӢеҗ‘еӨ©зәҝйҳө ж— зәҝз”өжөӢеҗ‘йҮҮз”ЁеӨ©зәҝеҜ№дҝЎеҸ·жәҗеҸ‘еҮәзҡ„дҝЎеҸ·иҝӣиЎҢжҺҘ收пјҢжңүдәӣжөӢеҗ‘жҠҖжңҜйҮҮз”Ёзҡ„жҳҜеҚ•дёӘеӨ©зәҝпјҢдҪҶжҳҜжөӢеҗ‘зі»з»ҹйҮҮз”Ёзҡ„жҳҜеӨҡйҳөе…ғеӨ©зәҝйҳөдҪңдёәз©әй—ҙдҝЎеҸ·зҡ„жҺҘ收и®ҫеӨҮпјҢйҖҡиҝҮеҜ№еҗ„дёӘйҳөе…ғеӨ©зәҝй—ҙжҺҘ收еҲ°дҝЎеҸ·зҡ„еӨ„зҗҶпјҢиҺ·еҫ—е…¶е№…еәҰе’ҢзӣёдҪҚпјҢз”ұдәҺе№…еәҰе’ҢзӣёдҪҚдёҺдҝЎеҸ·зҡ„жқҘжіўж–№еҗ‘жңүе…іпјҢжүҖд»Ҙж №жҚ®иҝҷз§Қе…ізі»еҸҜд»ҘзЎ®е®ҡдҝЎеҸ·зҡ„жқҘжіўж–№еҗ‘гҖӮ
-
еҸҢ/еӨҡйҖҡйҒ“жөӢеҗ‘еӨ©зәҝйҳө

еӣҫ3 жөӢеҗ‘еӨ©зәҝеҲҶзұ»
ж— дәәжңәжөӢеҗ‘еӨ©зәҝйҳөеҸ—жөӢеҗ‘зі»з»ҹеә”з”ЁзҺҜеўғдёӯзү©зҗҶз»“жһ„зҡ„йҷҗеҲ¶пјҢеӨ©зәҝеёғйҳөеҢәеҹҹеёёеёёеҸӘиғҪеңЁжҹҗдёҖзү№е®ҡзҡ„з©әй—ҙеҶ…гҖӮе°ұе№Іж¶үд»ӘжөӢеҗ‘дҪ“еҲ¶иҖҢиЁҖпјҢеёёи§Ғзҡ„еёғйҳөеҪўејҸжңүеӣҫдёӯжүҖзӨәеҮ з§ҚгҖӮ
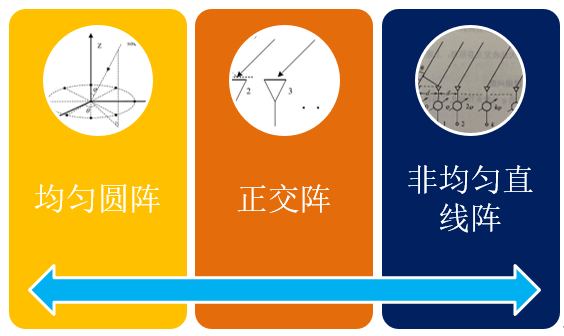
вҖӢеӣҫ4 жөӢеҗ‘йҳөеӨ©зәҝйҳөеһӢ
д»ҺдёҠеӣҫеҸҜзҹҘпјҢдёҚи®әжөӢеҗ‘еӨ©зәҝйҳөйҮҮз”Ёе“Әз§Қе®һзҺ°еҪўејҸпјҢеӨҡйҳөе…ғеӨ©зәҝйҳөзҡ„ж ·ејҸеӨҡз§ҚеӨҡж ·пјҢеҰӮдә”йҳөе…ғеӨ©зәҝйҳөгҖҒе…«йҳөе…ғеӨ©зәҝйҳөгҖҒеӣӣйҳөе…ғеӨ©зәҝйҳөгҖҒзҺҜеҪўеӨ©зәҝйҳөзӯүгҖӮдёҚеҗҢзҡ„еӨ©зәҝйҳөжңүдёҚеҗҢзҡ„еёғеұҖпјҢжҜҸз§ҚеӨ©зәҝйҳөзҡ„зү№жҖ§д№ҹжҳҜеӨ§дёҚзӣёеҗҢпјҢиҰҒж №жҚ®е®һйҷ…зҡ„йңҖиҰҒйҖүжӢ©дёҚеҗҢеҪўејҸзҡ„еӨ©зәҝйҳөгҖӮ
ж— и®әз©әй—ҙи°ұжөӢеҗ‘иҝҳжҳҜе№Іж¶үд»ӘжөӢеҗ‘пјҢзҺ°еңЁжҜ”иҫғжҲҗзҶҹзҡ„жҳҜеқҮеҢҖеӨ©зәҝйҳөпјҢеҰӮеңҶйҳөгҖҒзәҝйҳөзӯүгҖӮ
дҫҝжҗәејҸжөӢеҗ‘еӨ©зәҝйҳөеӯҗи®ҫи®Ў
жң¬йЎ№зӣ®и®ҫи®ЎдәҶе°ҸеһӢеҢ–зҡ„йҳөеӯҗ, дёәдәҶиҺ·еҸ–иүҜеҘҪзҡ„е®ҪеёҰеҢ№й…Қж•ҲжһңпјҢжҲ‘们еҖҹеҠ©з ”еҸ‘зҡ„pythonеӨ©зәҝиҮӘеҠЁеҢ–и®ҫи®Ўе№іеҸ°пјҢеҜ№PCBз”өи·Ҝзҡ„еҗ„еҸӮж•°иҝӣиЎҢдәҶиҮӘеҠЁи®ҫи®ЎгҖӮ
дёӢйқўжҳҜж•ҙдёӘиҪҜ件зҡ„еҗҜеҠЁжҺҘеҸЈпјҢеҲҶдёәеӣӣдёӘеҮҪж•°жЁЎеқ—пјҢеҲҶеҲ«е®ҢжҲҗеӨ©зәҝе»әжЁЎгҖҒиҫ№з•ҢжқЎд»¶и®ҫзҪ®гҖҒеҲҶжһҗи®Ўз®—е’Ңе·ҘзЁӢдҝқеӯҳеҠҹиғҪгҖӮ
# еӨ©зәҝе»әжЁЎ
ANNT_DRAW()
# и®ҫзҪ®иҫ№з•ҢжқЎд»¶
ANNT_SETMART()
# еҲҶжһҗи®Ўз®—
ANNT_Analyze()
# е·ҘзЁӢдҝқеӯҳ
ANNT_Save()
дёӢеӣҫжҳҜ第дёҖдёӘеҮҪж•°е®ҢеҗҺеӨ©зәҝе»әжЁЎеҗҺзҡ„жЁЎеһӢ, д»ҺеӣҫдёӯеҸҜи§ҒпјҢиҜҘеӨ©зәҝйҳөеӯҗйҮҮз”ЁPCBз”өи·ҜеҪўејҸе®һзҺ°еҒ¶жһҒеӯҗеӨ©зәҝпјҢе…¶еңЁе·ҘдҪңйў‘зӮ№еӨ„е…·жңүиҫғе®Ҫжіўжқҹе’ҢиүҜеҘҪзҡ„50ΩеҢ№й…ҚгҖӮйҳөеӯҗз»“жһ„еҰӮдёӢпјҢеңЁPCBзҡ„дёӨйқўеҲҶеҲ«дёәйҰҲз”өзӮ№е’Ңиҫҗе°„дҪ“пјҢиҫҗе°„дҪ“зҡ„з»“жһ„еҸҜд»Ҙе®һзҺ°иҫғе®Ҫзҡ„жіўз“ЈгҖӮ
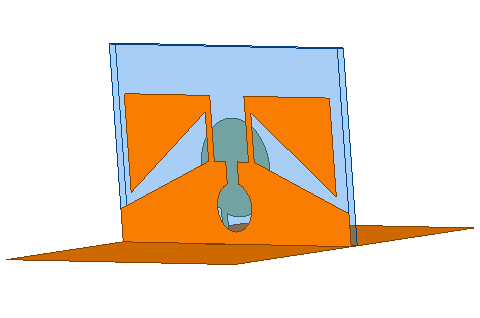
еӣҫ5 жң¬ж–Үзҡ„жөӢеҗ‘йҳөеӯҗ
е…¶е·ҘдҪңеҺҹзҗҶдёҺдј з»ҹзҡ„дёүи§’еҪўPCBйҳөеӯҗзӣёзұ»дјјпјҢеҸҜи§ҶдҪңдёҖз§ҚеҸҳеҪўпјҢеҪ“еј и§’2ΘиҫғеӨ§ж—¶е…·жңүиҫғеҘҪзҡ„е®Ҫйў‘зү№жҖ§пјҢдҪҶе…¶ж•°еҖјеҲҶжһҗжҜ”иҫғеӣ°йҡҫпјҢдёәдәҶе®һзҺ°еӨ©зәҝйҳөеӯҗзҡ„й©»жіўжҜ”дјҳдәҺ1.2пјҢи°ғз”ЁдәҶpythonеӨ©зәҝиҮӘеҠЁеҢ–и®ҫи®Ўе№іеҸ°зҡ„еӨ©зәҝиҮӘеҠЁе»әжЁЎжЁЎеқ—пјҢз”ұpython иҮӘдё»е®ҢжҲҗеӨ©зәҝйҳөеӯҗжЁЎеһӢзҡ„жһ„е»әгҖӮ
# еӨ©зәҝиҮӘеҠЁе»әжЁЎ
def annt_modify():
draw_model()
result=annt_anysl()
for item in result:
if item["s11"]>-20:
changemode()
else:
break
вҖӢANNT_SETMART()еҮҪж•°е®һзҺ°д»ҝзңҹеүҚзҡ„иҫ№з•ҢеӨ„зҗҶпјҢеҢ…жӢ¬и®ҫзҪ®жқҗж–ҷеұһжҖ§гҖҒжҝҖеҠұжәҗи®ҫзҪ®д»ҘеҸҠиҫҗе°„иҫ№з•Ңи®ҫзҪ®зӯүгҖӮ
ANNT_Analyze()еҮҪж•°иҙҹиҙЈеӨ©зәҝйҳөеӯҗзҡ„д»ҝзңҹпјҢдёӢйқўжҳҜиҜҘеӨ©зәҝйҳөеӯҗзҡ„зү№жҖ§гҖӮ
е…¶S11еҰӮдёӢеӣҫжүҖзӨәпјҢеңЁе·ҘдҪңйў‘зӮ№5.8GHzеӨ„е…¶S11иҫҫеҲ°дәҶ-25dB,еҚіVSWR<1.2гҖӮеңЁиҜҘеӨ„йҳ»жҠ—е®һзҺ°иүҜеҘҪеҢ№й…ҚпјҢж„Ҹе‘ізқҖдёҚйңҖиҰҒйўқеӨ–зҡ„йҳ»жҠ—иҪ¬еҢ–з”өи·Ҝе°ұеҸҜд»Ҙе®һзҺ°50Ωзҡ„еҢ№й…ҚпјҢз®ҖеҢ–дәҶз”өи·Ҝи®ҫи®ЎпјҢйҷҚдҪҺи®ҫи®ЎжҲҗжң¬гҖӮ
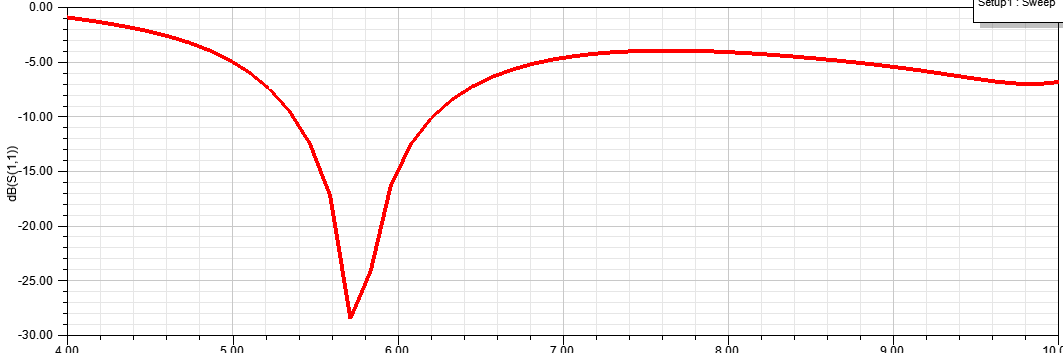
вҖӢеӣҫ6 S11жӣІзәҝ
еӣҫ7жҳҜиҜҘеһӢйҳөеӯҗзҡ„з”өжөҒеҲҶеёғпјҢд»ҺеӣҫдёӯеҸҜд»Ҙжё…жҷ°зҡ„зңӢеҮәиҜҘйҳөеӯҗзҡ„йҰҲз”өж–№ејҸдёҚдҪҶе®һзҺ°дәҶйҳ»жҠ—еҢ№й…ҚпјҢеҗҢж—¶д№ҹдҝқиҜҒдәҶжңүж•ҲйҰҲз”өгҖӮ
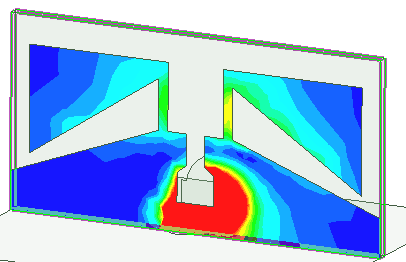
вҖӢеӣҫ7 з”өжөҒеҲҶеёғ
дёӢеӣҫжҳҜиҜҘйҳөеӯҗзҡ„дёҚеңҶеәҰпјҢе…¶е…·жңүиүҜеҘҪзҡ„дёҚеңҶеәҰпјҢд»ҺиҖҢжңүж•Ҳзҡ„дҝқйҡңдәҶдҪҝз”ЁиҜҘйҳөеӯҗдҪңдёәжөӢеҗ‘еӨ©зәҝйҳөзҡ„жөӢеҗ‘еҮҶзЎ®еәҰгҖӮ
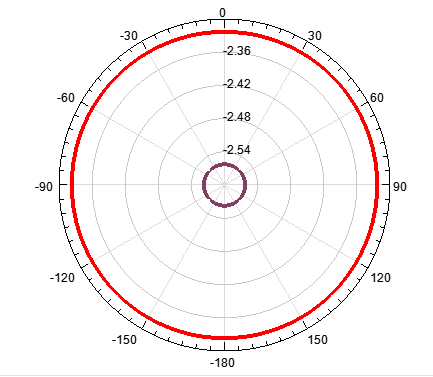
вҖӢеӣҫ 8 дёҚеңҶеәҰ
дёӢеӣҫжҳҜеӨ©зәҝйҳөеӯҗзҡ„ж–№еҗ‘жҖ§пјҢйҳөеӯҗеә•йғЁзҡ„еҸҚе°„жқҝйҳ»жҢЎдәҶе…¶еҗ‘еҗҺиҫҗе°„пјҢдҪҝе…¶еңЁHйқўдёә0еәҰеҲ°90еәҰгҖӮ
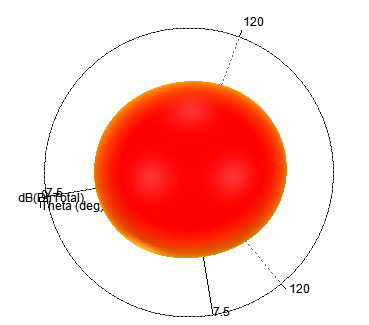
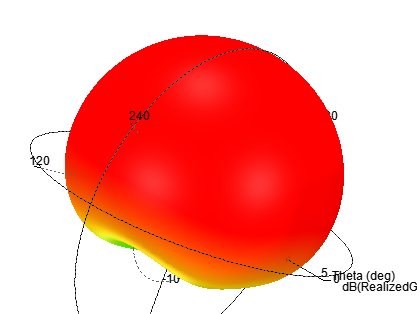
вҖӢеӣҫ9 жөӢеҗ‘йҳөеӯҗX-Yе№ійқў@5.8GHz
дҫҝжҗәејҸдә”йҳөе…ғжөӢеҗ‘еӨ©зәҝйҳө
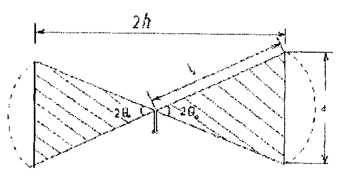
еҹәдәҺдёҠиҝ°зҡ„е°ҸеһӢеҢ–еӨ©зәҝйҳөе…ғпјҢи®ҫи®ЎдәҶдёҖж¬ҫдә”йҳөе…ғжөӢеҗ‘зәҝйҳөпјҢпјҢе®ғжҳҜе°Ҷеҗ„йҳөе…ғеқҮеҢҖзӯүи·қзҡ„еҲҶеёғеҲ°дёҖжқЎзӣҙзәҝдёҠпјҢйҳөе…ғй—ҙйҡ”жҳҜдҝЎеҸ·жіўй•ҝзҡ„дәҢеҲҶд№ӢдёҖпјҢеҗ„йҳөе…ғй—ҙе…·жңүзӣёеҗҢзҡ„зү№жҖ§пјҢеҰӮдёӢеӣҫжүҖзӨәгҖӮ
иҜҘеӨ©зәҝйҳөеӯҗзҡ„зү№е®ҡжһ„еһӢеҶіе®ҡдәҶе…¶з»„жҲҗзҡ„еӨ©зәҝйҳөе…·жңүдёӨз§ҚжҺ’еҲ—еҪўејҸпјҢеҲҶеҲ«еҰӮеӣҫ10е’Ңеӣҫ11 пјҢдёҚеҗҢзҡ„жҺ’еҲ—ж–№ејҸдёӯйҳөеӯҗй—ҙзҡ„еҜ„з”ҹиҖҰеҗҲжҳҜдёҚеҗҢзҡ„пјҢдёӨз§Қжһ„еһӢеҝ…然жңүдёҖз§ҚеҜ„з”ҹиҖҰеҗҲеҪұе“Қиҫғе°ҸпјҢйӮЈд№ҲйҖүе“ӘдёҖз§ҚйҖӮеҗҲз”ЁдәҺж— дәәжңәзҡ„жөӢеҗ‘еӨ©зәҝйҳөе‘ўпјҢжҲ‘们дёӢдёҖжңҹж–Үз« еҶҚи§ҒгҖӮ
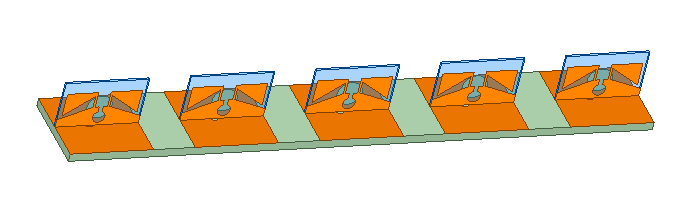
вҖӢеӣҫ10 дә”йҳөе…ғжөӢеҗ‘зәҝйҳөжҺ’еҲ—ж–№ејҸ1

вҖӢеӣҫ11 дә”йҳөе…ғжөӢеҗ‘зәҝйҳөжҺ’еҲ—ж–№ејҸ2
 зІӨе…¬зҪ‘е®үеӨҮ 44030902003195еҸ·
зІӨе…¬зҪ‘е®үеӨҮ 44030902003195еҸ·