
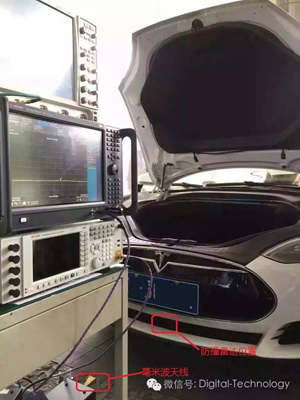
最近,网上关于特斯拉电动车的自动驾驶系统倍受争议,褒扬和批评的案例都成为焦点。为此,来自中国的黑客们,360汽车信息安全团队和浙江大学联合进行了首次攻击特斯拉自动驾驶系统的实车实验。下图是360汽车信息安全团队负责人刘健皓和浙江大学智能系统安全实验室成员闫琛在Keysight公司北京开放实验室进行毫米波雷达干扰实验时的照片。

相关的实验信息之前6月份在本公众平台上做过首发,但由于相关实验还没有正式发布,为避免研究信息泄露,所以对相关信息做了删除处理。目前,相关的攻击实验结果刚刚在在世界顶级黑客会议DEF CON做过发布,相关报道也已经见诸网站,数字君就再来梳理一下相关信息。
据悉,受益于特斯拉公司新推出的“自动驾驶技术”,部分S型轿车和所有的X型SUV都实现了自动驾驶功能。获取2015年10月的更新后,数以万计的车辆安装上了自动驾驶系统。这项技术通过使用车内的雷达、摄像头、GPS和超声波传感器等,来保持车辆在自己的行车道内以及前后左右的安全车距,并且能够在人们发出命令的时候变道。下图是网上流传的Tesla的自动驾驶系统的照片。
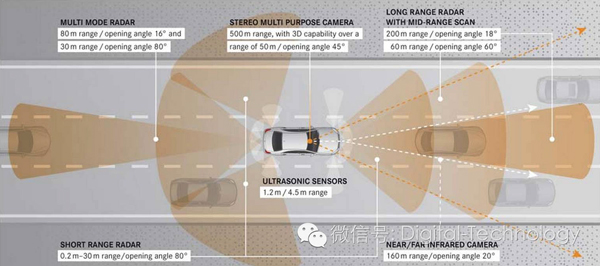
可以看到,Tesla前方最重要的防撞系统由安装在挡风玻璃上的摄像头和车头的防撞雷达构成。据悉,摄像头是一家以色列公司Mobileye提供,而防撞雷达由德国著名的BOSCH公司提供。自动驾驶系统通过对摄像头和雷达的资料处理分析,汽车就能够识别交通信号、观测其他车辆以及行人,并根据车道信息对驾驶情况做出调整。网上关于Tesla摄像头的拆解信息比较多,但关于其使用的防撞雷达的频点、信号特征、调制方式等都没有公开信息。
非成像的汽车防撞雷达采用的有激光、超声波、红外线、毫米波等方式。毫米波雷达穿透性强,测距精度受雨、雪、雾灯天气因素影响小,同时除了测距还可以测速和测方位角,且天线体积小、尺寸小,因此是汽车防撞雷达的主流研究方向。目前国际上汽车防撞雷达的主要频段工作在24GHz、36GHz、60GHz、77GHz等。汽车防撞雷达的信号特征是总体设计的一个非常重要参数,为了破解Tesla的防撞雷达信号,360团队贡献出了Model S,对其最重要的正前方的前视雷达的毫米波信号进行了截获分析。测试环境如下图所示。
通过简单分析,Tesla的前视雷达采用了70多GHz的毫米波波段,因此测试中使用了叶博士赞助的全套毫米波的测试系统。主要包括:N9040B信号分析仪、110GHz下变频模块,DSOS804A高精度示波器,89601B软件。从中可以看出,Tesla的防撞雷达工作在约77GHz左右,它没有采用传统的调频连续波(FMCW)调制方式,而是比较复杂的线性调频。整个雷达脉冲串由几组线性调频的Chirp脉冲信号组成,信号带宽有几百MHz,每组Chirp信号有不同的斜率和宽度。
线性调频信号是一种带宽大、分辨率高的信号,在军工领域有广泛应用,用于汽车防撞雷达时,信号处理算法复杂度低,降低了硬件成本。Tesla的这几组线性调频信号构成了类似三角波的线性调频扫描方式,每个周期都有正、负调频斜率两部分,因此与传统防撞雷达的线性调频连续波(FMCW)信号相比具有不同的特点。三角波的线性调频扫描雷达通过上、下扫频段的差拍频谱进行配对处理,能够消除距离和速度的耦合,可以更方便实现多目标环境中运动目标的检测与参数估计。因此,可以看出Tesla使用了比较复杂的三角波线性调频方式,至于为什么采用这几组扫频信号组成特殊形状,可能和编码或抗干扰能力有关,这有待汽车防撞雷达的专家做进一步解读。
研究完信号特征之后,我们根据相应的信号带宽和调制格式,用SystemVu软件模仿信号特征重新生成相应的干扰信号,并下载到8267D矢量信号发生器里,然后通过毫米波上变频器变频到77GHz,用毫米波天线对准Tesla的毫米波雷达实施主动干扰。可以看到,根据干扰或压制信号的不同,可以让特斯拉完全忽略前面的障碍物,也可以凭空让特斯拉紧急制动。
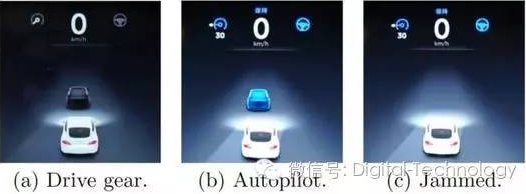
毫米波雷达被攻击后,前车从仪表盘上瞬间消失
 粤公网安备 44030902003195号
粤公网安备 44030902003195号