еҹәдәҺжңәиҪҪе№іеҸ°зҡ„е№Іж¶үд»ӘжөӢеҗ‘жҠҖжңҜз ”з©¶
0 еј•иЁҖ
йҡҸзқҖиҲӘз©әз”өеӯҗдҫҰеҜҹжҠҖжңҜзҡ„еҸ‘еұ•пјҢжңәиҪҪжөӢеҗ‘зі»з»ҹд»Ҙе…¶дҪңз”ЁиҢғеӣҙеӨ§гҖӮдҫҰжөӢи·қзҰ»иҝңгҖӮжңәеҠЁжҖ§ејәе’ҢеҸҜе®һзҺ°еҚ•жңәеҜ№ең°йқўзӣ®ж Үе®ҡдҪҚзӯүдјҳзӮ№пјҢиғҪеӨҹе®ҢжҲҗең°йқўйҖҡдҝЎз”өеӯҗжҲҳи®ҫеӨҮжүҖдёҚиғҪе®ҢжҲҗзҡ„иҝңи·қзҰ»гҖӮеӨ§еҢәеҹҹдҪңжҲҳд»»еҠЎпјҢжӯЈи¶ҠжқҘи¶ҠеҸ—еҲ°еӣҪеҶ…еӨ–е…іжіЁгҖӮдҪҶжҳҜеңЁе®һйҷ…е·ҘзЁӢеә”з”ЁдёӯпјҢжңәиҪҪжөӢеҗ‘дёӯйқўдёҙзқҖд»ҘдёӢеҮ дёӘж–№йқўзҡ„й—®йўҳгҖӮ
(1)жңәиҪҪе№іеҸ°еҸҜдҫӣеёғи®ҫеӨ©зәҝйҳөеҲ—зҡ„жңүж•Ҳз©әй—ҙгҖӮе…Ғи®ёзҡ„еӨ©зәҝйҳөе…ғе°әеҜёе’Ңж•°йҮҸеҚҒеҲҶжңүйҷҗпјҢдёҚиғҪдҪҝз”ЁеӨ§еҹәзЎҖеӨ©зәҝйҳө;еҗҢж—¶йЈһжңәз»“жһ„йқўеӨҡдёәеј§йқўпјҢиҝҷд№ҹйҷҗеҲ¶дәҶеқҮеҢҖеңҶеҪўйҳөеҗ‘дҪҺйў‘ж®өжү©еұ•зҡ„еҸҜиғҪгҖӮжң¬ж–ҮиҖғиҷ‘еҲ°йЈһжңәжң¬иә«зҡ„з»“жһ„зү№зӮ№жҳҜжңәиә«жЁӘеҗ‘зӘ„зәөеҗ‘й•ҝпјҢдёәжңүж•ҲеҲ©з”ЁйЈһжңәжңәи…№зҡ„з©әй—ҙпјҢжҸҗеҮәдәҶеқҮеҢҖжӨӯеңҶеёғйҳөзҡ„еҪўејҸпјҢйҖҡиҝҮд»ҝзңҹеҲҶжһҗдәҶжӨӯеңҶйҳөеҲ—еӯ”еҫ„дёҺжіўй•ҝд№ӢжҜ”еҜ№е…Ҙе°„и§’еәҰзҡ„дј°и®ЎжҖ§иғҪеҪұе“ҚгҖӮ
(2)зҺ°д»Јйӣ·иҫҫзі»з»ҹпјҢйҖҡеёёйҮҮз”ЁеңЁзӣ®ж Үйӣ·иҫҫе‘Ёеӣҙй…ҚеӨҮжңүжәҗиҜұйҘөиҝӣиЎҢдҝқжҠӨпјҢиҝҷе°ұиҰҒжңәиҪҪжөӢеҗ‘зі»з»ҹжңүй«ҳзҡ„еҲҶиҫЁеҠӣпјҢдҪҶжҳҜеҹәдәҺзӣёдҪҚе№Іж¶үд»Әзҡ„жөӢеҗ‘ж–№жі•еҸӘиғҪе®һзҺ°еҜ№еҚ•дёӘдҝЎеҸ·зҡ„жөӢеҗ‘пјҢиҖҢз©әй—ҙи°ұдј°и®ЎжөӢеҗ‘жі•еҸҜд»Ҙе®һзҺ°еҜ№дёҖдёӘжіўжқҹе®ҪеәҰеҶ…еӨҡдёӘе…Ҙе°„дҝЎеҸ·зҡ„жқҘжіўж–№еҗ‘дј°и®ЎпјҢжүҖд»Ҙжңүж•Ҳең°жҸҗй«ҳз©әй—ҙи°ұдј°и®Ўж–№жі•еңЁе®һйҷ…жөӢеҗ‘зі»з»ҹдёӯзҡ„еҲҶиҫЁеҠӣиҮіе…ійҮҚиҰҒгҖӮ
(3)еңЁе®һйҷ…жөӢеҗ‘дёӯеӨ©зәҝйҳөеҲ—йҖҡйҒ“е№…зӣёеӨұиЎЎгҖӮеӨ©зәҝйҳөе…ғзҡ„дә’иҖҰзӯүдјҡеҜјиҮҙжөӢеҗ‘жҖ§иғҪзҡ„дёӢйҷҚпјҢжүҖд»ҘдәҹйңҖйҮҮз”Ёжңүж•Ҳзҡ„ж ЎжӯЈж–№жі•жқҘж”№е–„жөӢеҗ‘жҖ§иғҪгҖӮ
жң¬ж–ҮйҮҚзӮ№з ”究еүҚдёӨдёӘж–№йқўзҡ„й—®йўҳгҖӮ
1 жңәиҪҪе№іеҸ°жөӢеҗ‘еӨ©зәҝйҳөи®ҫи®Ў
1.1 зӣёе…іе№Іж¶үд»ӘжөӢеҗ‘жҠҖжңҜ
жөӢеҗ‘еҺҹзҗҶеҰӮдёӢпјҡеңЁжөӢеҗ‘еӨ©зәҝйҳөе·ҘдҪңйў‘зҺҮиҢғеӣҙеҶ…е’Ң0~360°ж–№еҗ‘дёҠпјҢеҗ„жҢүдёҖе®ҡ规еҫӢи®ҫзӮ№пјҢеҗҢж—¶еңЁйў‘зҺҮй—ҙйҡ”е’Ңж–№дҪҚй—ҙйҡ”дёҠе»әз«Ӣж ·жң¬зҫӨпјҢеңЁжөӢеҗ‘ж—¶пјҢе°ҶжүҖеҫ—зҡ„ж•°жҚ®е’Ңж ·жң¬зҫӨиҝӣиЎҢзӣёе…іиҝҗз®—е’Ңе·®еҖјеӨ„зҗҶпјҢд»ҘиҺ·еҫ—жқҘжіўдҝЎеҸ·ж–№еҗ‘пјҢеҸҜд»Ҙе®һзҺ°е®Ҫйў‘еёҰиҢғеӣҙеҶ…ж— жЁЎзіҠжөӢеҗ‘пјҢеҜ№йҳөеҲ—зҡ„ж‘Ҷж”ҫеҪўејҸжІЎжңүзү№ж®ҠиҰҒжұӮгҖӮ
еҹәдәҺзӣёдҪҚе·®жӢҹеҗҲзҡ„зӣёе…іе№Іж¶үд»Әд»Јд»·еҮҪж•°дёәпјҡ
ејҸдёӯпјҡθдёәи§ӮжөӢзӣёдҪҚе·®еҗ‘йҮҸ;θjдёәеҜ№еә”дәҺ(θпјҢφ)ж–№еҗ‘зҡ„зӣёдҪҚе·®еҗ‘йҮҸпјҢдҪҝеҫ—ρjжңҖеӨ§еҖјжүҖеҜ№еә”зҡ„еҺҹе§ӢзӣёдҪҚж ·жң¬еҖје°ұжҳҜе®һйҷ…е…Ҙе°„дҝЎеҸ·зҡ„ж–№дҪҚгҖӮ
1.2 жөӢеҗ‘еӨ©зәҝйҳөи®ҫи®ЎеҸҠд»ҝзңҹ
й’ҲеҜ№жңәиҪҪе№іеҸ°зҡ„зү№зӮ№пјҢз»ҷеҮәдәҶжӨӯеңҶеӨ©зәҝйҳөеҲ—ж‘Ҷж”ҫзӨәж„ҸпјҢеҰӮеӣҫ1жүҖзӨәгҖӮ
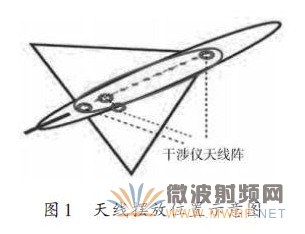
и®ҫMдёӘеӨ©зәҝйҳөе…ғеқҮеҢҖеҲҶеёғеңЁдёҖдёӘжӨӯеңҶеңҶе‘ЁдёҠпјҢд»ҘеҮ дҪ•дёӯеҝғдёәеҸӮиҖғзӮ№пјҢеҲҷйҳөеҲ—зҡ„ж–№еҗ‘еҗ‘йҮҸa(θ)еҸҜиЎЁзӨәдёәпјҡ
и®ҫa(θA)пјҢa(θB )жҳҜеқҮеҢҖжӨӯеңҶйҳөеҲ—дёҠзҡ„2дёӘж–№еҗ‘еҗ‘йҮҸпјҢеҲҷзӣёе…ізі»ж•°дёәпјҡ
д»ҝзңҹеҲҶжһҗ1:
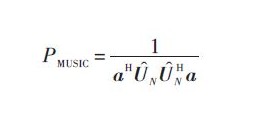
и®ҫжӨӯеңҶйҳөеӯ”еҫ„дёҺжіўй•ҝд№ӢжҜ”(d λ)еҲҶеҲ«дёә12е’Ң14,дҝЎеҸ·е…Ҙе°„ж–№еҗ‘дёә50°пјҢ5е…ғеқҮеҢҖжӨӯеңҶйҳөзҡ„зӣёе…ізі»ж•°еӣҫеҰӮеӣҫ2жүҖзӨәгҖӮ
еҸҜи§ҒпјҢзӣёе…ізі»ж•°зҡ„жңҖеӨ§еҖјеңЁж–№дҪҚи§’50°еӨ„гҖӮд»Һд»ҝзңҹеӣҫ2еҸҜеҫ—еҰӮдёӢз»“и®әпјҡd λи¶ҠеӨ§пјҢдё»з“Ји¶ҠзӘ„пјҢж–№дҪҚжөӢйҮҸзІҫеәҰи¶Ҡй«ҳ;еҺ»йҷӨжөӢеҗ‘жЁЎзіҠе°ұжҳҜиҰҒжұӮзӣёе…ізі»ж•°еӣҫзҡ„дё»з“ЈдёҺеүҜз“Јзҡ„й«ҳеәҰжҳ“дәҺеҲҶиҫЁгҖӮMUSICз®—жі•е…¶еҲҶиҫЁеҠӣдёҺйҳөеҲ—еӯ”еҫ„жҲҗжӯЈжҜ”гҖӮд№ҹе°ұжҳҜиҜҙеҪ“еҸҜеҲ©з”Ёзҡ„йҳөеҲ—еӯ”еҫ„еҸ—йҷҗж—¶пјҢдјҡеҪұе“ҚеҲ°еҲҶиҫЁеҠӣпјҢдҪҶдёәдәҶжҸҗй«ҳзі»з»ҹзҡ„еҲҶиҫЁеҠӣиҖҢеўһеӨ§еӨ©зәҝзӣҳзҡ„еӯ”еҫ„д»Јд»·еӨӘеӨ§гҖӮжүҖд»ҘиҰҒеңЁдёҚйңҖиҰҒйҖҡиҝҮеўһеӨ§йҳөеҲ—зҡ„зү©зҗҶеӯ”еҫ„жқҘе®һзҺ°MUSICз®—жі•зҡ„еҲҶиҫЁеҠӣдёҠдёӢеҠҹеӨ«гҖӮ
2 MUSICз®—жі•еҲҶиҫЁиғҪеҠӣ2.1 MUSICз®—жі•еҺҹзҗҶеҸҠеҲҶиҫЁжҖ§иғҪи®ҫжңүPдёӘдёҚзӣёе…ізӘ„еёҰе…Ҙе°„еҲ°Mе…ғиҝңеңәзәҝйҳөдёҠпјҢеҲҷйҳөеҲ—иҫ“еҮәеҗ‘йҮҸдёәпјҡ
ејҸдёӯпјҡX(t)дёәM × 1з»ҙзҡ„йҳөеҲ—иҫ“еҮәеҗ‘йҮҸ;AдёәM × Pз»ҙзҡ„йҳөеҲ—жөҒеһӢпјҢе®ғжҳҜиҫҗе°„дҝЎеҸ·е…Ҙе°„и§’αе’Ңβзҡ„еҮҪж•°;S(t)дёәP × 1з»ҙзҡ„е…Ҙе°„дҝЎеҸ·еҗ‘йҮҸ;N(t)дёәM × 1з»ҙзҡ„еҷӘеЈ°еҗ‘йҮҸгҖӮз”ұдәҺдҝЎеҸ·дёҺеҷӘеЈ°зӣёдә’зӢ¬з«ӢпјҢжҺҘ收数жҚ®зҡ„еҚҸж–№е·®зҹ©йҳөдёәпјҡ
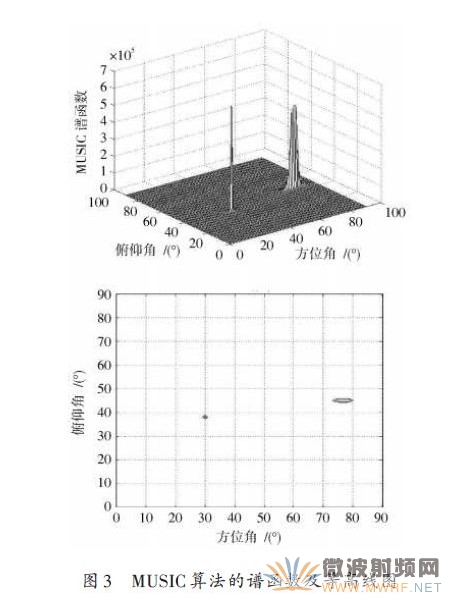
еҜ№RиҝӣиЎҢзү№еҫҒеҲҶи§ЈпјҢPдёӘеӨ§зү№еҫҒеҖјеҜ№еә”зҡ„зү№еҫҒеҗ‘йҮҸUs = [e1,e2 ,…пјҢep]еј жҲҗдҝЎеҸ·еӯҗз©әй—ҙ;M – PдёӘе°Ҹзү№еҫҒеҖјеҜ№еә”зҡ„зү№еҫҒеҗ‘йҮҸUN = [ep + 1,ep + 2 ,…пјҢeM ]еј жҲҗеҷӘеЈ°еӯҗз©әй—ҙпјҢдёӨдёӘеӯҗз©әй—ҙжӯЈдәӨгҖӮеңЁеҷӘеЈ°еӯҗз©әй—ҙдёҠжҠ•еҪұдёә0зҡ„йҳөеҲ—жөҒеҪўжүҖеҜ№еә”зҡ„ж–№еҗ‘е°ұжҳҜдҝЎеҸ·зҡ„DOA,MUSICз®—жі•йҖҡиҝҮжҗңзҙўејҸ(6)зҡ„жһҒеӨ§еҖјзӮ№жқҘиҺ·еҫ—иҫҗе°„дҝЎеҸ·зҡ„DOA:
д»ҝзңҹеҲҶжһҗ2:
еӨ©зәҝйҳөеҲ—йҮҮз”ЁеқҮеҢҖзҡ„5е…ғжӨӯеңҶйҳөпјҢдҝЎеҷӘжҜ”дёә20 dB,еҝ«жӢҚж•°дёә1 000,еҸ–дёүдёӘиҫҗе°„дҝЎеҸ·(45°пјҢ75°)пјҢ(45°пјҢ78°)пјҢ(38°пјҢ30°)пјҢд»ҝзңҹз»“жһңеҰӮеӣҫ3жүҖзӨәгҖӮ
д»ҝзңҹеҲҶжһҗ2:
еӨ©зәҝйҳөеҲ—йҮҮз”ЁеқҮеҢҖзҡ„5е…ғжӨӯеңҶйҳөпјҢдҝЎеҷӘжҜ”дёә20 dB,еҝ«жӢҚж•°дёә1 000,еҸ–дёүдёӘиҫҗе°„дҝЎеҸ·(45°пјҢ75°)пјҢ(45°пјҢ78°)пјҢ(38°пјҢ30°)пјҢд»ҝзңҹз»“жһңеҰӮеӣҫ3жүҖзӨәгҖӮ
д»ҝзңҹеҲҶжһҗ3:
еӨ©зәҝзӣҳеӯ”еҫ„еҜ№MUSICз®—жі•еҲҶиҫЁеҠӣзҡ„еҪұе“ҚгҖӮеӨ©зәҝйҳөеҲ—еҪўејҸйҮҮз”ЁеқҮеҢҖзҡ„5 е…ғжӨӯеңҶйҳөпјҢеҸ–дёӨдёӘиҫҗе°„дҝЎеҸ·еҲҶеҲ«дёә(45°пјҢ75°)пјҢ(45°пјҢ78°)пјҢеҚідёӨдёӘе…Ҙе°„и§’й—ҙи·қдёә3°пјҢдҫқжҚ®ејҸ(7)еҜ№дёҚеҗҢеӯ”еҫ„дёҺжіўй•ҝжҜ”(d λ)жқЎд»¶дёӢзҡ„еҲҶиҫЁиғҪеҠӣиҝӣиЎҢд»ҝзңҹпјҢеҰӮеӣҫ4жүҖзӨәгҖӮ
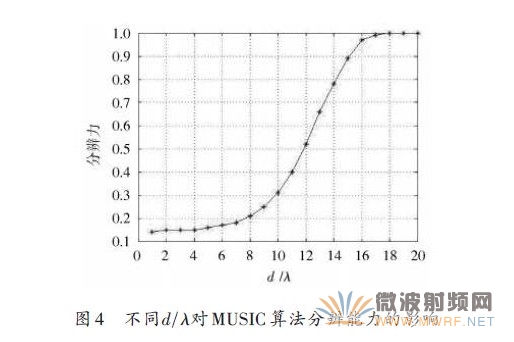
д»Һеӣҫ4еҸҜд»ҘзңӢеҮәпјҢMUSICз®—жі•еҲҶиҫЁиғҪеҠӣйҡҸеӨ©зәҝзӣҳеӯ”еҫ„зҡ„еўһеӨ§иҖҢжҸҗй«ҳгҖӮж•…еҸҜд»ҘиҖғиҷ‘йҖҡиҝҮеўһеӨ§еӨ©зәҝзӣҳеӯ”еҫ„жқҘжҸҗй«ҳMUSICз®—жі•зҡ„еҲҶиҫЁеҠӣпјҢдҪҶеӨ©зәҝзӣҳзҡ„е°әеҜёеҸ—йҷҗпјҢдёҚеҸҜд»Ҙж— йҷҗеўһеӨ§гҖӮйүҙдәҺеӣӣйҳ¶зҙҜз§ҜйҮҸзҡ„йҳөеҲ—е…·жңүжү©еұ•зү№жҖ§пјҢеҲ©з”Ёе®ғжқҘеўһеҠ еӨ©зәҝзӣҳзҡ„еӯ”еҫ„пјҢд»ҘжҸҗй«ҳйҳөеҲ—зҡ„еҲҶиҫЁеҠӣгҖӮ
2.2 еӣӣйҳ¶зҙҜз§ҜйҮҸ2D-MUSIC
2.2.1 еӣӣйҳ¶зҙҜз§ҜйҮҸ2D-MUSICзҡ„йҳөеҲ—жү©еұ•зү№жҖ§еҸҠеҺҹзҗҶ
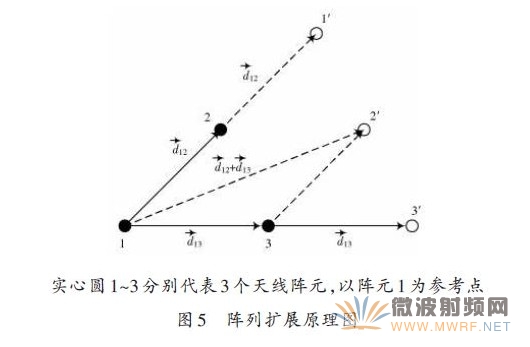
зҺӢж°ёиүҜзӯүдәәз»ҷеҮәдәҶеӣӣйҳ¶зҙҜз§ҜйҮҸзү№жҖ§зҡ„иҜҰз»ҶзҗҶи®әжҺЁеҜјпјҢиҝҷйҮҢдёҚеҶҚйҮҚеӨҚйҳҗиҝ°гҖӮеҰӮеӣҫ5жүҖзӨәпјҢд»Ҙз©әй—ҙдёӯ3дёӘеӨ©зәҝйҳөе…ғдёәдҫӢпјҢеҜ№еӣӣйҳ¶зҙҜз§ҜйҮҸзҡ„йҳөеҲ—жү©еұ•зү№жҖ§иҝӣиЎҢиҜҙжҳҺгҖӮ
е…¶йҳөеҲ—еҜјеҗ‘зҹўйҮҸеҸҜд»ҘиЎЁзӨәдёәпјҡ
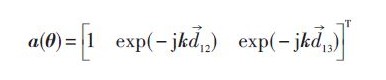
ејҸдёӯпјҡk иЎЁзӨәиҫҗе°„дҝЎеҸ·е…Ҙе°„и§’еәҰзҹўйҮҸ;dоҒҢ12е’ҢdоҒҢ13еҲҶеҲ«д»ЈиЎЁйҳөе…ғ2.3зӣёеҜ№еҸӮиҖғйҳөе…ғ1зҡ„дҪҚзҪ®зҹўйҮҸгҖӮ
еҲ©з”Ёеӣӣйҳ¶зҙҜз§ҜйҮҸзҡ„жү©еұ•зү№жҖ§еҜ№еӣҫ5 зҡ„йҳөеҲ—жү©еұ•еҗҺзҡ„еҜјеҗ‘зҹўйҮҸдёәпјҡ
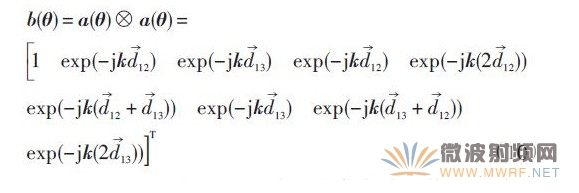
з”ұеӣҫ5еҸҜд»ҘзңӢеҮәпјҢз©әй—ҙдёӯ3дёӘзңҹе®һйҳөе…ғжһ„жҲҗзҡ„йҳөеҲ—з»Ҹеӣӣйҳ¶зҙҜз§ҜйҮҸйҳөеҲ—жү©еұ•еҗҺжһ„жҲҗдәҶ6дёӘйҳөе…ғзҡ„иҷҡжӢҹйҳөеҲ—пјҢйҳөеҲ—еӯ”еҫ„жү©еӨ§1еҖҚпјҢ然еҗҺеҲ©з”Ёжү©еұ•еҗҺзҡ„йҳөеҲ—еҜ№иҫҗе°„дҝЎеҸ·зҡ„е…Ҙе°„и§’еәҰиҝӣиЎҢдј°и®ЎпјҢд»ҘиҫҫеҲ°жҸҗй«ҳеҲҶиҫЁеҠӣзҡ„ж•ҲжһңгҖӮ
еҹәдәҺеӣӣйҳ¶зҙҜз§ҜйҮҸзҡ„MUSICз®—жі•д№ҹжҳҜеҲ©з”ЁдҝЎеҸ·еӯҗз©әй—ҙдёҺеҷӘеЈ°еӯҗз©әй—ҙзҡ„жӯЈдәӨжҖ§пјҢе…¶з©әй—ҙи°ұеҮҪж•°иЎЁиҫҫејҸдёәпјҡ
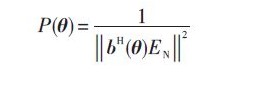
йҖҡиҝҮи°ұеі°жҗңзҙўпјҢжүҫеҲ°PдёӘжһҒеӨ§еҖјеҜ№еә”зҡ„и§’еәҰпјҢе®һзҺ°еҜ№иҫҗе°„дҝЎеҸ·зҡ„дәҢз»ҙDOAдј°и®ЎгҖӮ
д»ҝзңҹеҲҶжһҗ4:
д»ҘеқҮеҢҖ5е…ғжӨӯеңҶйҳөдёәдҫӢйӘҢиҜҒеӣӣйҳ¶зҙҜз§ҜйҮҸзҡ„MUSICз®—жі•е’ҢMUSICз®—жі•еҲҶиҫЁжҖ§иғҪпјҢеҗҢж ·йҮҮз”Ёзҡ„дҝЎеҷӘжҜ”дёә20 dB,еҝ«жӢҚж•°дёә1 000,еҸ–дёүдёӘиҫҗе°„дҝЎеҸ·(45°пјҢ75°)пјҢ(45°пјҢ80°)пјҢ(38°пјҢ30°)пјҢд»ҝзңҹз»“жһңеҰӮеӣҫ6жүҖзӨәгҖӮ

з”ұеӣҫ6(a)еҸҜд»ҘзңӢеҮәпјҢйҮҮз”ЁMUSIC з®—жі•еҜ№е…Ҙе°„и§’еәҰдәҺ(45°пјҢ75°)пјҢ(45°пјҢ80°)иҝӣиЎҢдј°и®ЎеӨұиҙҘпјҢиҖҢйҮҮз”Ёеӣӣйҳ¶зҙҜз§ҜйҮҸMUSICз®—жі•иҝӣиЎҢдј°и®Ўж—¶еҫ—еҲ°дәҶдёӨдёӘе°–й”җзҡ„и°ұеі°пјҢйҖҡиҝҮеӣӣйҳ¶зҙҜз§ҜйҮҸMUSIC з®—жі•зҡ„и°ұеҮҪж•°жҗңзҙўеҫ—еҲ°е…Ҙе°„и§’еәҰдёә(45°пјҢ75.5°)пјҢ(45°пјҢ80°)гҖӮз”ұжӯӨеҸҜи§ҒпјҢйҮҮз”Ёеӣӣйҳ¶зҙҜз§ҜйҮҸMUSICз®—жі•дҪҝеҫ—йҳөеҲ—еӯ”еҫ„еҫ—еҲ°дәҶжңүж•Ҳзҡ„жү©еұ•пјҢе…¶еҲҶиҫЁеҠӣй«ҳдәҺMUSICз®—жі•гҖӮ
2.2.2 еӣӣйҳ¶зҙҜз§ҜйҮҸ2D-MUSICз®—жі•дёҺMUSICз®—жі•и®Ўз®—йҮҸеҲҶжһҗ
MUSICз®—жі•йҖҡиҝҮеҜ№жҺҘ收数жҚ®зҡ„еҚҸж–№е·®зҹ©йҳөе’ҢиҝӣиЎҢзү№еҫҒеҲҶи§ЈпјҢиҝҗз®—йҮҸдёәο(M2 K) + ο(M3)гҖӮи®Ўз®—дёҖдёӘеӣӣйҳ¶зҙҜз§ҜйҮҸйңҖиҰҒ9Lж¬ЎеӨҚд№ҳиҝҗз®—пјҢе…¶дёӯLиЎЁзӨәеҝ«жӢҚж•°пјҢеҘҮејӮеҖјеҲҶи§Јзҡ„и®Ўз®—йҮҸзәҰдёәο(M6)пјҢе…¶дёӯMиЎЁзӨәжүҖжһ„йҖ зҡ„зҙҜз§ҜйҮҸж•°жҚ®зҹ©йҳөзҡ„з»ҙж•°гҖӮе…¶е®һд»Һеӣӣйҳ¶зҙҜз§ҜйҮҸMUSIC з®—жі•йҳөеҲ—жү©еұ•еҺҹзҗҶеӣҫеҸҜзҹҘпјҢйҮҮз”ЁиҜҘз®—жі•иҝӣиЎҢи°ұеі°жҗңзҙўжүҖз”Ёзҡ„йҳөе…ғдёӘж•°иҝңиҝңзҡ„еӨҡдәҺеҺҹйҳөеҲ—зҡ„йҳөе…ғдёӘж•°гҖӮиӯ¬еҰӮеңЁеӣҫ6(b)зҡ„д»ҝзңҹе®һйӘҢдёӯпјҢйңҖиҰҒеҜ№ж–№дҪҚи§’0~360°пјҢд»°и§’0~90°иҢғеӣҙеҶ…иҝӣиЎҢи°ұеі°жҗңзҙўпјҢйӮЈд№Ҳе°Ҷж–№дҪҚи§’е’Ңд»°и§’зҡ„жҗңзҙўжӯҘй•ҝеҲҶеҲ«и®ҫзҪ®дёә1°пјҢ0.5°пјҢеҲҷйңҖиҰҒ361 × 181ж¬Ўи°ұеҮҪж•°и®Ўз®—пјҢиҖҢи°ұеҮҪж•°и®Ўз®—йҮҸдёҺйҳөеҲ—еҜјеҗ‘зҹўйҮҸжңүе…іпјҢеҚідёҺйҳөе…ғж•°йҮҸжңүе…ігҖӮд№ҹе°ұжҳҜиҜҙиҷҪ然еӣӣйҳ¶зҙҜз§ҜйҮҸMUSICз®—жі•еј•е…ҘиҷҡжӢҹйҳөе…ғжү©еӨ§еӯ”еҫ„дҪҝеҫ—еҲҶиҫЁеҠӣжҸҗй«ҳпјҢдҪҶд№ҹеҜјиҮҙи°ұеі°жҗңзҙўзҡ„и®Ўз®—йҮҸеӨ§еўһгҖӮ
д»ҝзңҹеҲҶжһҗ5:
и®Ўз®—йҮҸд»ҝзңҹз»ҹи®ЎеҲҶжһҗгҖӮеҜ№дёҚеҗҢеҝ«жӢҚж•°дёӢиҝҷдёӨдёӘз®—жі•жүҖеҚ з”Ёзҡ„и®Ўз®—ж—¶й—ҙиҝӣиЎҢз»ҹи®ЎпјҢеҗ„з®—жі•и®Ўз®—ж—¶й—ҙеқҮз”ұ100ж¬ЎMonte-Carloе®һйӘҢиҝӣиЎҢе№іеқҮеҫ—еҲ°пјҢи§ҒиЎЁ1.
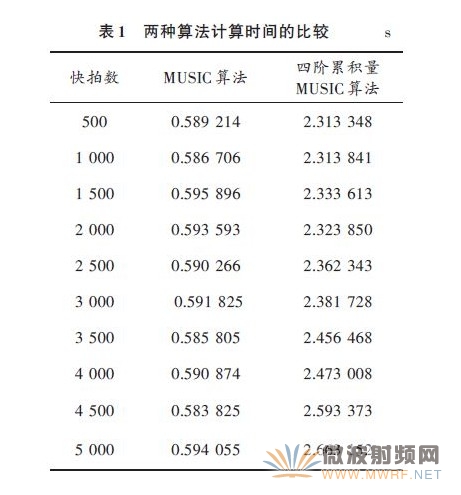
з”ұиЎЁ1еҸҜд»ҘзңӢеҮәпјҢеӣӣйҳ¶зҙҜз§ҜйҮҸMUSICз®—жі•зҡ„и®Ўз®—ж—¶й—ҙеӨ§зәҰжҳҜMUSIC з®—жі•зҡ„4 еҖҚгҖӮдҪҶж–ҮзҢ®[5]дёӯд»Һз®—жі•зҡ„и§’еәҰз»ҷеҮәдәҶдёҖз§Қеҝ«йҖҹеҺ»еҶ—дҪҷзҡ„ж–№жі•пјҢе°ҶM2 × M2 зҡ„еӣӣйҳ¶зҙҜз§ҜйҮҸзҹ©йҳөиҪ¬еҢ–дёә(2M – 1) × (2M – 1)зҡ„еӣӣйҳ¶зҙҜз§ҜйҮҸзҹ©йҳөпјҢд»ҺиҖҢеӨ§еӨ§йҷҚдҪҺдәҶи®Ўз®—йҮҸгҖӮеҗҢж—¶зӣёдҝЎйҡҸзқҖDSP е’ҢFPGA зӯүж•°жҚ®еӨ„зҗҶйЈһйҖҹеҸ‘еұ•пјҢеӣӣйҳ¶зҙҜз§ҜйҮҸMUSICз®—жі•зҡ„иҝҗз®—ж—¶й—ҙдјҡеҮҸе°ҸпјҢд»ҺиҖҢжӣҙеҘҪзҡ„е°Ҷеӣӣйҳ¶зҙҜз§ҜйҮҸMUSICз®—жі•еә”з”ЁдәҺйҳөеҲ—дҝЎеҸ·еӨ„зҗҶдёӯгҖӮ
3 з»“иҜӯ
ж №жҚ®жңәиҪҪе№Іж¶үд»ӘжөӢеҗ‘зі»з»ҹйқўдёҙзқҖеҸҜдҫӣеёғйҳөзҡ„з©әй—ҙжңүйҷҗпјҢдёҚиғҪеғҸйҷҶеҹәдёҖж ·еёғйҳөжҲҗзҗҶжғійҳөеҲ—пјҢиҖғиҷ‘еҲ°йЈһжңәжңәиә«жЁӘеҗ‘иҫғзӘ„иҖҢзәөеҗ‘еҫҲй•ҝз»ҷеҮәдәҶжӨӯеңҶйҳөеҲ—жЁЎеһӢпјҢйҖҡиҝҮд»ҝзңҹеҲҶжһҗдәҶжӨӯеңҶеӯ”еҫ„дёҺжіўй•ҝд№ӢжҜ”еҜ№е…Ҙе°„и§’еәҰзҡ„дј°и®ЎжҖ§иғҪпјҢеҸ‘зҺ°дәҶжөӢеҗ‘зІҫеәҰеҸ—йҳөеҲ—жңүж•Ҳеӯ”еҫ„зҡ„йҷҗеҲ¶гҖӮ然иҖҢеңЁе®һйҷ…жңәиҪҪжөӢеҗ‘зі»з»ҹдёӯйҖҡиҝҮеўһеӨ§йҳөеҲ—еӯ”еҫ„жқҘжҸҗй«ҳеҲҶиҫЁеҠӣдј°и®ЎжҖ§иғҪжҳҜдёҚзҺ°е®һгҖӮиҖғиҷ‘йҖҡиҝҮеӣӣйҳ¶зҙҜз§ҜйҮҸйҳөеҲ—жү©еұ•зү№жҖ§жқҘеј•е…ҘиҷҡжӢҹйҳөе…ғпјҢиҝҷж ·е°ұеҸҜд»ҘеңЁеҸ—йҷҗе№іеҸ°дёҠе®һзҺ°еӨ©зәҝзӣҳеӯ”еҫ„еӨ§еўһпјҢе®ҢжҲҗдёҖгҖӮдәҢз»ҙDOAй«ҳзІҫеәҰдј°и®ЎгҖӮжғҹдёҖзҡ„зјәзӮ№е°ұжҳҜи®Ўз®—йҮҸеӨ§пјҢжүҖд»Ҙд»ҠеҗҺзҡ„еҠӘеҠӣж–№еҗ‘жҳҜдёҚд»…иҰҒд»Һж”№иҝӣз®—жі•зҡ„и§’еәҰжқҘеҮҸе°‘еӣӣйҳ¶зҙҜз§ҜйҮҸзҡ„иҝҗз®—йҮҸпјҢд№ҹд»Һз”ЁDSPжқҘе®һзҺ°зҡ„и§’еәҰзј©зҹӯжү§иЎҢж—¶й—ҙгҖӮ
 зІӨе…¬зҪ‘е®үеӨҮ 44030902003195еҸ·
зІӨе…¬зҪ‘е®үеӨҮ 44030902003195еҸ·