д»Һе°„йў‘жҠҖжңҜи§’еәҰжҺўи®ЁжұҪиҪҰйӣ·иҫҫзҡ„и®ҫи®ЎиҰҒзӮ№
жұҪиҪҰйӣ·иҫҫжҠҖжңҜж–№е…ҙжңӘиүҫгҖӮж— и®әжҳҜзҺ°йҳ¶ж®өд№ӢзӣІзӮ№дҫҰжөӢпјҢиҝҳжҳҜеҸ‘еұ•дёӯзҡ„иҮӘеҠЁй©ҫ驶жҺ§еҲ¶пјҢй«ҳжҖ§иғҪгҖҒй«ҳеҸҜйқ жҖ§гҖҒе°Ҹе·§еҸҠдҪҺжҲҗжң¬пјҢжҳҜдҝғиҝӣжұҪиҪҰйӣ·иҫҫж ёеҝғжҠҖжңҜдёҚж–ӯеҸ‘еұ•дёҺе®Ңе–„дёҚеҸҜжҲ–зјәзҡ„еӣ зҙ дёҺеҠЁжңәгҖӮ
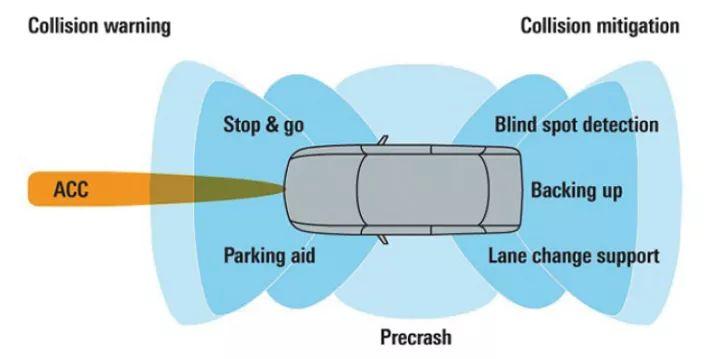
жұҪиҪҰйӣ·иҫҫжҳҜй©ҫ驶иҫ…еҠ©зі»з»ҹзҡ„йҮҚиҰҒз»„жҲҗйғЁд»ҪгҖӮе…¶дёҚд»…жҸҗдҫӣй©ҫ驶дәәе‘ҳиҲ’йҖӮд»ҺиҖҢеҮҸе°‘зҙ§еј ж„ҹзҡ„й©ҫ驶зҺҜеўғпјҢжӣҙдёәе…ЁйқўжҸҗй«ҳйҒ“и·ҜдәӨйҖҡе®үе…ЁеҘ е®ҡеҝ…иҰҒзҡ„еҹәзЎҖгҖӮд»Һи®ҫи®ЎжұҪиҪҰйӣ·иҫҫеҸҠе…¶жңҖдҪіеҢ–еҲ°еӨ§йҮҸз”ҹдә§д»ҘеҸҠе®үиЈ…пјҢйғҪдјҡдҪҝз”ЁеҲ°еӨҡз§ҚжЈҖйӘҢдёҺжөӢйҮҸж–№жі•гҖӮжң¬ж–Үд»Һе°„йў‘пјҲRFпјүжөӢйҮҸжҠҖжңҜи§’еәҰжҺўи®ЁжұҪиҪҰйӣ·иҫҫзҡ„иӢҘе№Іи®ҫи®ЎиҰҒзӮ№гҖӮ
йӣ·иҫҫжіўеҪўзҡ„зәҝжҖ§еәҰ
дёҺе…¶д»–зҡ„йӣ·иҫҫжҠҖжңҜзӣёзұ»дјјпјҢжұҪиҪҰйӣ·иҫҫеҗҢж ·еҮӯеҖҹжҺҘ收зӣ®ж Үзү©дҪ“зҡ„еҸҚе°„дҝЎеҸ·пјҢ并иҝӣдёҖжӯҘеҲҶжһҗжҺҘ收дҝЎеҸ·дёҺеҺҹе§ӢеҸ‘е°„дҝЎеҸ·д№Ӣй—ҙеңЁж—¶й—ҙгҖҒйў‘зҺҮд»ҘеҸҠзӣёдҪҚдёҠзҡ„еӨҡйҮҚзӣёе…іжҖ§пјҢд»ҺиҖҢеҲӨж–ӯзӣ®ж Үзү©дҪ“дёҺйӣ·иҫҫд№Ӣй—ҙзҡ„зӣёеҜ№йҖҹеәҰдёҺз©әй—ҙдҪҚзҪ®гҖӮ
жұҪиҪҰйӣ·иҫҫзҡ„ж ёеҝғжҠҖжңҜд№ӢдёҖжҳҜйӣ·иҫҫжіўеҪўи®ҫи®ЎгҖӮзәҝжҖ§йў‘зҺҮи°ғеҸҳиҝһз»ӯжіўпјҲLFMCWпјҢеёёз®Җз§°дёәFMCWпјүжҳҜдёҖз§Қеёёз”Ёзҡ„йӣ·иҫҫжіўеҪўгҖӮеҸ‘е°„дҝЎеҸ·пјҲдәҰеҚіжіўеҪўпјүзҡ„зЁіе®ҡеәҰдёҺзәҝжҖ§еәҰзӣҙжҺҘеҪұе“Қйӣ·иҫҫеҜ№зӣ®ж Үзү©дҪ“зҡ„иҫЁиҜҶиғҪеҠӣгҖӮз”ұдәҺжұҪиҪҰйӣ·иҫҫеӨ§еӨҡе·ҘдҪңеңЁжҜ«зұіжіўйў‘ж®өпјҢжүҖйҖүз”Ёзҡ„еҗ„з§Қжқҗж–ҷеҸҠе…ғ件еӣәжңүзҡ„йқһзәҝжҖ§зү№жҖ§йғҪдјҡзәіе…ҘжңҖз»Ҳзҡ„еҸ‘е°„дҝЎеҸ·дёҺжҺҘ收дҝЎеҸ·дёӯпјҢд»ҺиҖҢе№Іжү°дҝЎеҸ·еҲҶжһҗжј”з®—жі•гҖӮ
жұҪиҪҰйӣ·иҫҫеҲ©з”ЁеҸ‘е°„дҝЎеҸ·дёҺжҺҘ收дҝЎеҸ·д№Ӣй—ҙзӣёдә’е…іиҒ”зҡ„йў‘зҺҮе·®дёҺзӣёдҪҚе·®пјҢй’ҲеҜ№еӨҡдёӘзӣ®ж Үзү©дҪ“зҡ„йҖҹеәҰдёҺдҪҚзҪ®иҝӣиЎҢеҲӨж–ӯгҖӮеҪ“ж•ҙдёӘйӣ·иҫҫзі»з»ҹпјҢзү№еҲ«жҳҜеҸ‘е°„жңәйғЁд»Ҫзҡ„зәҝжҖ§еәҰеҮәзҺ°йқһзҗҶжғізү№жҖ§ж—¶пјҢйў‘зҺҮе·®дёҺзӣёдҪҚе·®зҡ„и®Ўз®—з»“жһңе°Ҷдјҡдә§з”ҹжЁЎзіҠжҖ§пјҢйҖ жҲҗйӣ·иҫҫзі»з»ҹж— жі•жӯЈзЎ®еҲӨж–ӯзӣ®ж Үзү©дҪ“пјҢд»ҘиҮҙдәҺеҸ‘з”ҹйҮҚеӨ§е·®й”ҷгҖӮеҜ№дәҺжңӘжқҘзҡ„иҮӘеҠЁй©ҫ驶жҺ§еҲ¶жҠҖжңҜжқҘиҜҙпјҢиҝҷжҳҜз»қеҜ№иҰҒйҒҝе…Қзҡ„гҖӮ
дёәдәҶжңҖеӨ§зЁӢеәҰең°еҮҸе°‘й”ҷиҜҜзҺҮпјҢеҝ…йЎ»е°ҪеҸҜиғҪең°жҸҗй«ҳеҸ‘е°„дҝЎеҸ·зҡ„зәҝжҖ§еәҰпјҢ并еҮӯеҖҹжөӢйҮҸзЎ®дҝқдә§е“Ғд№ӢзәҝжҖ§еәҰзҡ„зЁіе®ҡжҖ§гҖӮеҹәдәҺдҝЎеҸ·е“ҒиҙЁзҡ„дёҘиӢӣиҰҒжұӮпјҢзәҝжҖ§еәҰзҡ„жөӢйҮҸеӨ§еӨҡйҮҮз”Ёй«ҳз«Ҝзҡ„д»ӘеҷЁи®ҫеӨҮпјҢд»ҘйҷҚдҪҺжөӢйҮҸиҜҜе·®гҖӮзӣ®еүҚзҡ„й«ҳз«Ҝд»ӘеҷЁйғҪеҸҜд»ҘеҲҶжһҗеёҰе®Ҫи¶…иҝҮ1-GHzзҡ„дҝЎеҸ·пјҢд»ҘзЎ®дҝқе®Ңж•ҙжөӢйҮҸйӣ·иҫҫдҝЎеҸ·гҖӮ
жұҪиҪҰйӣ·иҫҫжӯЈиҝ…йҖҹжү©еұ•пјҢдёәиҪҰиҫҶжҸҗдҫӣжӣҙеӨҡй©ҫ驶иҫ…еҠ©дёҺжӣҙй«ҳе®үе…ЁжҖ§
еӨ©зәҝи®ҫи®ЎдёҺжөӢйҮҸ
еңЁжұҪиҪҰйӣ·иҫҫеә”з”ЁдёӯпјҢж— и®әжҳҜеҸ‘е°„еӨ©зәҝиҝҳжҳҜжҺҘ收еӨ©зәҝпјҢйҖҡеёёйғҪдҪҝз”ЁзӣёжҺ§йҳөеҲ—гҖӮжҢүз…§ж•ҙдҪ“и®ҫи®ЎйңҖиҰҒпјҢеҸҜд»ҘйҮҮз”ЁзәҝжҖ§йҳөеҲ—жҲ–жҳҜе№ійқўйҳөеҲ—гҖӮ
дј—жүҖе‘ЁзҹҘпјҢйҳөеҲ—еӨ©зәҝзҡ„дё»иҰҒеҸӮж•°(дҫӢеҰӮпјҢдё»з“Јж–№еҗ‘еҸҠе®ҪеәҰгҖҒж—Ғз“ЈжҠ‘еҲ¶гҖҒйӣ¶зӮ№дҪҚзҪ®зӯүзӯү)еқҮеҸҜеҮӯеҖҹз®ҖеҚ•зҡ„ж•°еӯҰе…¬ејҸиҝӣиЎҢи®Ўз®—гҖӮ然иҖҢпјҢиҝҷз§Қи®Ўз®—з»“жһңзҡ„йҖӮз”ЁжҖ§жҳҜжңүжқЎд»¶зҡ„пјҢдәҰеҚіеҪ“йҳөеҲ—дёӯд»»дёӨеҚ•е…ғд№Ӣй—ҙзҡ„зӣёдә’иҖҰеҗҲдҪңз”ЁдёҺеҪұе“ҚжһҒе…¶еҫ®е°ҸиҮіеҸҜд»ҘеҝҪз•ҘдёҚи®Ўзҡ„ж—¶еҖҷгҖӮжңүдёҖз§Қж–№жі•еҸҜдҪҝеҫ—дёҠиҝ°зҡ„жқЎд»¶еҫ—д»Ҙж»Ўи¶іпјҢе°ұжҳҜеўһеҠ йҳөеҲ—еҚ•е…ғд№Ӣй—ҙзҡ„зӣёеҜ№и·қзҰ»гҖӮдёҚиҝҮпјҢиҝҷз§Қж–№жі•жүҖеёҰжқҘзҡ„еҪұе“ҚжҳҜз»Ҳз«Ҝдә§е“Ғзҡ„е°әеҜёд№ҹдјҡйҡҸеҠ еӨ§гҖӮ
еҰӮжһңж— жі•еҮӯеҖҹи®Ўз®—иҫҫеҲ°жңүж•Ҳ并еҮҶзЎ®ең°и®ҫи®ЎйҳөеҲ—еҚ•е…ғзҡ„зӣ®зҡ„пјҢжөӢйҮҸе°ұжҲҗдёәжңҖдҪіеҢ–иҝҮзЁӢдёӯзҡ„йҮҚиҰҒжүӢж®өпјҢеҶҚд»Ҙзӣёеә”зҡ„з”өи„‘иҪҜ件дҪңдёәиҫ…еҠ©пјҢд»ҘеҲ©дәҺеӨ§ж•°жҚ®(big data)иҝҗз®—гҖӮйҳөеҲ—еӨ©зәҝзҡ„жңҖдҪіеҢ–йҖҡеёёеҲҶдёәдёӢйқўеҮ дёӘжӯҘйӘӨпјҡ
·йҳөеҲ—еҹәжң¬еҚ•е…ғзҡ„иҫҗе°„еңәеһӢи®ҫи®Ў ·йҳөеҲ—еҚ•е…ғд№Ӣй—ҙзӣёдә’иҖҰеҗҲзҡ„иҜ„дј° ·еӨ©зәҝйҳөеҲ—зҡ„иҫҗе°„еңәеһӢи®ҫи®Ў ·йҳөеҲ—йҰҲз”өзі»з»ҹи®ҫи®Ў ·йӣ·иҫҫ收еҸ‘зі»з»ҹж•ҙеҗҲи®ҫи®Ў ·иҪҰиҫҶдҝқйҷ©жқ еҪұе“Қд№ӢиҖғйҮҸ
йҷӨжӯӨд№ӢеӨ–пјҢйӣ·иҫҫзі»з»ҹзҡ„ж•ҙдҪ“и®ҫи®Ўж–№жЎҲд№ҹеҝ…йЎ»еҢ…еҗ«е®үе…ЁдҫҝеҲ©жҖ§зҡ„иҰҒжұӮгҖӮиҖҢе®үе…ЁдҫҝеҲ©жҖ§еҸҲдјҡзӣҙжҺҘжҲ–й—ҙжҺҘең°еҪұе“ҚеҲ°еӨ©зәҝзҡ„и®ҫи®ЎпјҢеҸҜи°“гҖҢзүөдёҖеҸ‘иҖҢеҠЁе…Ёиә«гҖҚгҖӮ
еңЁи®ҫи®ЎйҳөеҲ—еҹәжң¬еҚ•е…ғж—¶пјҢе°Өе…¶жҳҜеңЁиҜ„дј°йҳөеҲ—еҚ•е…ғд№Ӣй—ҙзҡ„зӣёдә’иҖҰеҗҲиҝҮзЁӢдёӯпјҢеӣ дёәзӣёжҺ§еӨ©зәҝйҖҡеёёйғҪе…·жңүиҫғеӨ§зҡ„йҳөеҲ—еҚ•е…ғж•°йҮҸпјҢдҪҝеҫ—е®Ңж•ҙгҖҒеҮҶзЎ®дё”еҝ«жҚ·зҡ„жөӢйҮҸжҲҗдёәжңҖе…ій”®зҡ„еӣ зҙ гҖӮиҖҢиҰҒе®һзҺ°е®Ңж•ҙеҸҲеҮҶзЎ®зҡ„иҰҒжұӮпјҢеӨҡз«ҜеҸЈзҹўйҮҸзҪ‘з»ңеҲҶжһҗд»ӘжҳҜеҝ…дёҚеҸҜе°‘зҡ„гҖӮ
жӣҙиҝӣдёҖжӯҘең°иҖғиҷ‘е®үе…ЁдҫҝеҲ©жҖ§зҡ„иҰҒжұӮпјҢжұҪиҪҰйӣ·иҫҫеҗҢдёҖжү№дә§е“Ғзҡ„иҫҗе°„еңәеһӢзЁіе®ҡжҖ§иҮіе…ійҮҚиҰҒгҖӮиҖҢиҰҒиҫҫеҲ°иҝҷдёҖзӣ®ж ҮпјҢиҫҗе°„еңәеһӢжөӢйҮҸи®ҫеӨҮйҰ–е…Ҳеҝ…йЎ»е…·еӨҮиүҜеҘҪзҡ„жөӢйҮҸз»“жһңд№ӢеҸҜйҮҚеӨҚжҖ§гҖӮиҝҷд№ҹжҳҜжұҪиҪҰйӣ·иҫҫжөӢйҮҸжҠҖжңҜзҡ„йҡҫзӮ№д№ӢдёҖгҖӮ
еңЁдёҖиҲ¬жғ…еҶөдёӢпјҢеӨ©зәҝиҫҗе°„еңәеһӢзҡ„жөӢйҮҸеҝ…йЎ»еңЁиҝңеңә(far field)иҝӣиЎҢгҖӮиҝҷйҮҢзҡ„иҝңеңәжҳҜдёҖдёӘзӣёеҜ№зҡ„жҰӮеҝөпјҢжҢүз…§зӣ®еүҚдёҡз•Ңеёёз”Ёзҡ„еӨ©зәҝжөӢйҮҸзҗҶи®әд№Ӣе®ҡд№үпјҢиҝңеңәдёҺиў«жөӢйҮҸд№ӢеӨ©зәҝзҡ„е°әеҜёд»ҘеҸҠиҜҘеӨ©зәҝзҡ„е·ҘдҪңйў‘зҺҮиҢғеӣҙзӣёе…ігҖӮе…·дҪ“жқҘиҜҙпјҢжҹҗдёҖеӨ©зәҝд№ӢиҝңеңәдёҺиҜҘеӨ©зәҝзҡ„жңҖеӨ§е°әеҜёзҡ„е№іж–№жҲҗжӯЈжҜ”пјҢиҖҢдёҺиҜҘеӨ©зәҝзҡ„е·ҘдҪңжіўй•ҝжҲҗеҸҚжҜ”гҖӮ
дҫӢеҰӮпјҢжҹҗдёӘжұҪиҪҰйӣ·иҫҫдә§е“Ғзҡ„жңҖеӨ§е°әеҜёжҳҜ7.5cmпјҢеҰӮжһңе®ғзҡ„е·ҘдҪңйў‘зҺҮеӨ„еңЁ24GHzпјҢиҝҷж—¶зҡ„иҝңеңәеӨ§зәҰеңЁ0.9mд»ҘеӨ–гҖӮдҪҶжҳҜеҰӮжһңе®ғе·ҘдҪңеңЁ77GHzпјҢе…¶иҝңеңәе°Ҷжү©еӨ§еҲ°3mе·ҰеҸігҖӮеңЁдёҖиҲ¬зҡ„йҮҸдә§жқЎд»¶дёӢпјҢиҝҷж ·еӨ§зҡ„и·қзҰ»иҢғеӣҙеҮ д№Һж— жі•е®һзҺ°гҖӮ
77GHzжұҪиҪҰйӣ·иҫҫйў‘и°ұзҡ„еҷӘеЈ°
дёәдәҶе…ӢжңҚдёҠиҝ°иҝңеңәе®ҡд№үзҡ„еұҖйҷҗжҖ§пјҢеҸҜд»ҘйҖүжӢ©еңЁиҝ‘еңә(near field)иҝӣиЎҢж•°жҚ®йҮҮйӣҶпјҢ然еҗҺеҮӯеҖҹиҝ‘еңәдёҺиҝңеңәзҡ„еҜ№еә”е…ізі»пјҢе°ҶйҮҮйӣҶеҲ°зҡ„ж•°жҚ®иҪ¬жҚўжҲҗиҝңеңәзҡ„з»“жһңгҖӮиҷҪ然иҝҷз§Қиҝ‘еңәжөӢйҮҸж–№жі•дёҚеҶҚжңүи·қзҰ»иҢғеӣҙзҡ„йҷҗеҲ¶пјҢдҪҶжҳҜпјҢдёәдәҶзЎ®дҝқжөӢйҮҸз»“жһңзҡ„зІҫеҮҶеәҰпјҢдёҚд»…жөӢйҮҸи®ҫеӨҮдјҡеҸҳеҫ—зӣёеҪ“еӨҚжқӮпјҢж•°жҚ®йҮҮйӣҶжүҖйңҖзҡ„ж—¶й—ҙд№ҹдјҡжҲҗеҖҚеўһеҠ гҖӮжӯӨеӨ–пјҢеӣ дёәж•°жҚ®иҪ¬жҚўйңҖиҰҒйўқеӨ–зҡ„ж—¶й—ҙпјҢдҪҝеҫ—ж•ҙдёӘжөӢйҮҸиҝҮзЁӢеҸҳеҫ—еҚҒеҲҶеҶ—й•ҝпјҢд»ҘиҮҙдәҺеҫҲйҡҫж»Ўи¶ійҮҸдә§ж•ҲиғҪзҡ„иҰҒжұӮгҖӮ
зӣ®еүҚдёҡз•ҢжӯЈеңЁз ”究全新зҡ„ж–№жі•пјҢд»ҘжңҖеӨ§зЁӢеәҰең°йҷҚдҪҺдёҠиҝ°з©әй—ҙдёҺж—¶й—ҙзҡ„йҷҗеҲ¶пјҢд»ҺиҖҢеңЁйҖӮеҪ“зҡ„и·қзҰ»иҢғеӣҙеҶ…пјҢжҸҗй«ҳйҮҸдә§иғҪеҠӣгҖӮ
е№Іжү°дёҺжҠ—е№Іжү°
еҰӮеҗҢе…¶д»–е°„йў‘дә§е“ҒпјҢеҜ№дәҺжұҪиҪҰйӣ·иҫҫд№ҹеҗҢж ·еӯҳеңЁе№Іжү°дёҺжҠ—е№Іжү°зҡ„й—®йўҳгҖӮд»Һзӣ®еүҚзҡ„жҠҖжңҜжқҘзңӢпјҢеҚ•дёҖиҫҶиҪҰдёҠзҡ„йӣ·иҫҫж•°йҮҸжңүи¶…иҝҮеҚҒйў—зҡ„и¶ӢеҠҝгҖӮжүҖе№ёеҮӯеҖҹеӨ©зәҝзҡ„и®ҫи®Ўд»ҘеҸҠеңЁе®үиЈ…ж—¶зҡ„йҖӮеҪ“и°ғж•ҙпјҢеҸҜд»ҘеҮҸе°‘еҚ•дёҖиҫҶиҪҰдёҠеҗ„дёӘйӣ·иҫҫд№Ӣй—ҙзҡ„зӣёдә’е№Іжү°гҖӮ然иҖҢпјҢзӣ®еүҚиҝҳжІЎжңүдёҺжұҪиҪҰйӣ·иҫҫзӣёе…ізҡ„и®ҫи®ЎжҠҖжңҜж ҮеҮҶпјҢжұҪиҪҰйӣ·иҫҫжүҖиҝҗдҪңзҡ„йў‘зҺҮиҢғеӣҙжӣҙжҳҜж— йЎ»з”іиҜ·и®ёеҸҜиҜҒпјҢеӣ иҖҢеҜ№дәҺдёҚеҗҢиҪҰиҫҶпјҢзү№еҲ«жҳҜдёҚеҗҢеҲ¶йҖ е•Ҷзҡ„иҪҰиҫҶпјҢеҗ„иҪҰиҫҶдёҠйӣ·иҫҫд№Ӣй—ҙзҡ„зӣёдә’е№Іжү°дјҡжҳҜйқһеёёжЈҳжүӢзҡ„й—®йўҳгҖӮ
йүҙдәҺеӯҳеңЁиҝҮеӨҡдёҺе№Іжү°жәҗзӣёе…ізҡ„жңӘзҹҘеӣ зҙ пјҢеңЁжҠ—е№Іжү°иғҪеҠӣзҡ„и®ҫи®Ўйҳ¶ж®өпјҢд»ҺжңҖеқҸеӨ„зқҖзңјпјҢе…јйЎҫйӮЈдәӣжңҖеҲқзңӢиө·жқҘеҸ‘з”ҹжңәзҺҮдёҚй«ҳзҡ„еңәжҷҜпјҢд»ҘдҫҝжӯЈзЎ®иҜ„дј°йӣ·иҫҫзі»з»ҹиў«е№Іжү°еҗҺеҒҡеҮәйҡҫд»Ҙйў„жңҹзҡ„еҸҚеә”гҖӮ
еҰӮеүҚжүҖиҝ°пјҢжұҪиҪҰйӣ·иҫҫдё»иҰҒз”ЁжқҘеҮҶ确并еҝ«йҖҹең°еҲӨж–ӯзӣ®ж Үзү©дҪ“дёҺйӣ·иҫҫд№Ӣй—ҙзҡ„зӣёеҜ№йҖҹеәҰдёҺз©әй—ҙдҪҚзҪ®гҖӮй”ҷиҜҜзҡ„еҲӨж–ӯеҸҜеҲҶдёәдёӨеӨ§зұ»пјҡдёҖзұ»жҳҜгҖҢе№»и§ҶгҖҚпјҢеҚігҖҢж— дёӯз”ҹжңүгҖҚпјӣеҸҰдёҖзұ»жҳҜгҖҢзӣІи§ҶгҖҚпјҢеҚігҖҢи§ҶиҖҢдёҚи§ҒгҖҚгҖӮж— и®әиҜҜеҲӨеұһдәҺе“ӘдёҖзұ»пјҢйғҪдёҺдәӨйҖҡе®үе…ЁжҒҜжҒҜзӣёе…іпјҢеҜ№дәҺжңӘжқҘзҡ„иҮӘеҠЁй©ҫ驶жҺ§еҲ¶жҠҖжңҜжқҘиҜҙпјҢиҝҷдәӣйғҪжҳҜз»қеҜ№иҰҒйҒҝе…Қзҡ„гҖӮеҰӮжһңзӣёеҜ№и·қзҰ»и¶іеӨҹиҝңпјҢе°ұдјҡжңүе……д»Ҫзҡ„ж—¶й—ҙеҜ№иҜҜеҲӨиҝӣиЎҢдҝ®жӯЈгҖӮ
еӣ жӯӨпјҢеӨ„дәҺзӣёеҜ№иҝ‘и·қзҰ»ж—¶зҡ„иҜҜеҲӨе°ҶжҳҜеҚҒеҲҶеҚұйҷ©зҡ„гҖӮеә”иҜҘеҰӮдҪ•иҜ„дј°гҖҢзӣёеҜ№иҝ‘и·қзҰ»гҖҚпјҹдёҫдҫӢжқҘиҜҙпјҢеңЁеҹҺеҢәеҶ…зҡ„йҒ“и·ҜдёҠпјҢйҖҡеёёзҡ„ж—¶йҖҹйҷҗеҲ¶жҳҜ60km/hrгҖӮд»Ҙиҝҷж ·зҡ„йҖҹеәҰжҚўз®—дёҖдёӢпјҢ15mиҮі20mе°ұдјҡжҳҜгҖҢзӣёеҜ№иҝ‘и·қзҰ»гҖҚгҖӮеӣ дёәдёҖж—ҰеңЁиҝҷдёӘи·қзҰ»еҶ…еҮәзҺ°дәӨйҖҡејӮеёёпјҢйӣ·иҫҫзі»з»ҹеҝ…йЎ»иҝ…йҖҹ并жңүж•Ҳең°еҗҜеҠЁеҲ№иҪҰзі»з»ҹпјҢд»Ҙдҫҝи®©иЎҢиҝӣдёӯзҡ„иҪҰиҫҶеңЁдёҖз§’з”ҡиҮіжӣҙзҹӯзҡ„ж—¶й—ҙеҶ…еҒңдёӢжқҘгҖӮдҪҶй—®йўҳжҳҜпјҢеңЁиҝҷдёӘи·қзҰ»еҶ…йӣ·иҫҫзі»з»ҹеҸҜиғҪеҸ‘з”ҹдёҠиҝ°зҡ„гҖҢе№»и§ҶгҖҚжҠ‘жҲ–гҖҢзӣІи§ҶгҖҚеҗ—пјҹ
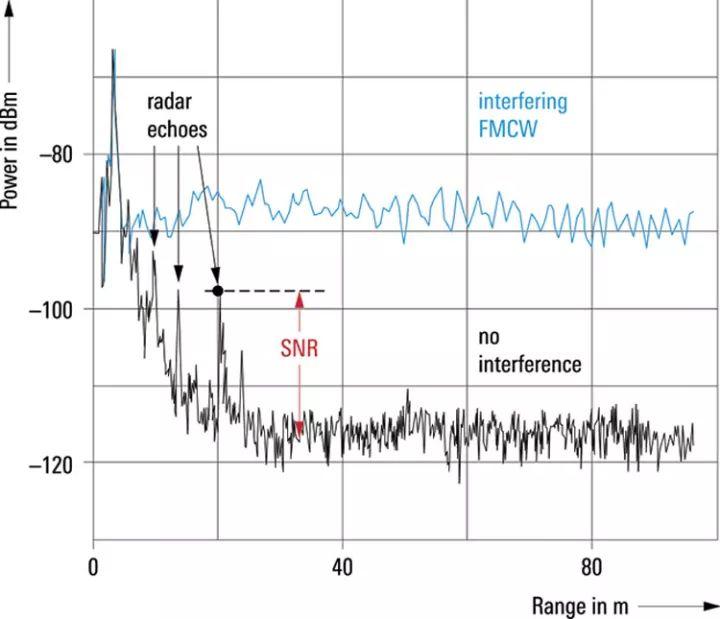
зӯ”жЎҲжҳҜиӮҜе®ҡзҡ„гҖӮд№ҹе°ұжҳҜиҜҙпјҢз”ұдәҺжҺҘ收系з»ҹеҸ—еҲ°е№Іжү°пјҢеңЁзү№е®ҡзҡ„жқЎд»¶дёӢ(з”ҡиҮіеҢ…жӢ¬еӨ©ж°”зҡ„еҪұе“Қ)пјҢжұҪиҪҰйӣ·иҫҫзі»з»ҹеҜ№дәҺзӣ®ж Үзү©дҪ“еҸҚе°„еӣһжқҘзҡ„дҝЎеҸ·д№Ӣж•Ҹж„ҹеәҰдјҡжҖҘеү§дёӢйҷҚпјҢеҺҹжң¬зҷҫзұід»ҘеӨ–зҡ„зӣ®ж Үзү©дҪ“йғҪеҸҜд»ҘеҲҶиҫЁпјҢиҖҢжӯӨж—¶е°ұиҝһеҚҒзұіе·ҰеҸізҡ„зӣ®ж Үзү©дҪ“йғҪйҡҫд»ҘиҫЁиҜҶгҖӮ
дёәдәҶзЎ®дҝқжұҪиҪҰйӣ·иҫҫзҡ„жҠ—е№Іжү°иғҪеҠӣпјҢж ҮеҮҶеҢ–зҡ„жөӢйҮҸж–№жі•жҳҜеҝ…иҰҒзҡ„гҖӮиҷҪ然зӣ®еүҚе°ҡж— жөӢйҮҸ法规пјҢдёҡз•ҢиҝҳжҳҜеҸҜд»ҘеҸӮиҖғе…¶д»–зұ»дјјзҡ„ж ҮеҮҶпјҢе…ҲиҝӣиЎҢеүҚжңҹзҡ„еҸҜйқ жҖ§жөӢйҮҸпјҢд»ҺиҖҢиөўеҫ—ж—¶й—ҙжҸҗеүҚжөӢйҮҸпјҢд»ҘдҫҝеңЁжӯЈејҸзҡ„жөӢйҮҸж–№жі•ж ҮеҮҶеҢ–д№ӢеҗҺпјҢеҹәдәҺе·Іжңүзҡ„ж•°жҚ®пјҢжҢү照法规йҖӮеҪ“дҝ®жӯЈжҠ—е№Іжү°дҪҷйҮҸпјҢжҠ‘жҲ–жҸҗеҚҮжҠ—е№Іжү°иғҪеҠӣгҖӮ
зӣ®еүҚзҡ„жҠ—е№Іжү°иғҪеҠӣжЈҖжөӢж–№жі•дё»иҰҒеҮӯеҖҹиҪҜ件и®ҫе®ҡеңәжҷҜпјҢеңЁз”өжіўжҡ—е®ӨйҮҢпјҢз”ұдҝЎеҸ·жәҗдә§з”ҹзү№е®ҡзҡ„йӣ·иҫҫжіўеҪўдҪңдёәе№Іжү°жәҗпјҢеҶҚз”ұйӣ·иҫҫзӣ®ж ҮжЁЎжӢҹеҷЁжЁЎжӢҹзү№е®ҡзҡ„зӣ®ж Үзү©дҪ“пјҢд»ҘжӯӨиҜ„дј°иў«жөӢйӣ·иҫҫеңЁиҜҘзү№е®ҡеңәжҷҜдёӯеҜ№дәҺзӣ®ж Үзү©дҪ“еҸҚе°„дҝЎеҸ·д№Ӣж•Ҹж„ҹеәҰзҡ„дёӢйҷҚзЁӢеәҰпјҢз”ұжӯӨжҺЁз®—иў«жөӢйӣ·иҫҫеңЁиҝҷдёҖзү№е®ҡеңәжҷҜдёӯеҜ№дәҺзү№е®ҡе№Іжү°жәҗзҡ„жҠ—е№Іжү°иғҪеҠӣгҖӮ

дёҚеҗҢзұ»еһӢзҡ„жұҪиҪҰйӣ·иҫҫж„ҹжөӢеҷЁе…ұдә«жңүйҷҗзҡ„е…ҚжҺҲжқғйў‘и°ұпјҢеӣ иҖҢеҸҜиғҪзӣёдә’е№Іжү°
з»“иҜӯ
з»јдёҠжүҖиҝ°пјҢз”ұдәҺж¶үеҸҠжһҒе…¶йҮҚиҰҒзҡ„дәӨйҖҡе®үе…Ёеӣ зҙ пјҢеңЁиҮӘеҠЁй©ҫ驶жҺ§еҲ¶жҠҖжңҜзңҹжӯЈжҲҗдёәдәә们ж—Ҙеёёз”ҹжҙ»зҡ„дёҖйғЁд»Ҫд№ӢеүҚпјҢе…¶дёӯе…ій”®жҠҖжңҜд№ӢдёҖзҡ„йӣ·иҫҫжҠҖжңҜиҝҳжңүеҫ…иҝӣдёҖжӯҘзҡ„еҸ‘еұ•дёҺе®Ңе–„пјҢдҫӢеҰӮпјҢйӣ·иҫҫжіўеҪўзәҝжҖ§еәҰзҡ„зЁіе®ҡжҖ§гҖҒйҮҸдә§зҡ„жҠҖжңҜ瓶йўҲгҖҒеӨҡз§ҚеңәжҷҜдёӯзҡ„жҠ—е№Іжү°иғҪеҠӣзӯүзӯүгҖӮиҖҢдёҺжӯӨеҜҶеҲҮзӣёе…ізҡ„жұҪиҪҰйӣ·иҫҫд№Ӣе°„йў‘жөӢйҮҸжҠҖжңҜпјҢе·Із»ҸдёәзІҫеҮҶзҡ„жөӢиҜ•д»ҘеҸҠжңӘжқҘжӣҙй«ҳзә§зҡ„жөӢйҮҸйңҖжұӮеҘ е®ҡдәҶеҝ…иҰҒзҡ„еҹәзЎҖгҖӮ
дҪңиҖ…пјҡеҸ°ж№ҫR&Sеә”з”Ёе·ҘзЁӢйғЁз»ҸзҗҶ йҷҲйЈһе®Ү
 зІӨе…¬зҪ‘е®үеӨҮ 44030902003195еҸ·
зІӨе…¬зҪ‘е®үеӨҮ 44030902003195еҸ·