е…үжҺ§зӣёжҺ§йҳөзҡ„еҹәжң¬еҺҹзҗҶеҸҠе…ЁеӣәжҖҒжҝҖе…үйӣ·иҫҫжҠҖжңҜжңҖж–°иҝӣеұ•
дәәзұ»еңЁжҺҢжҸЎз”өзЈҒжіўжҠҖжңҜзҡ„50е№ҙд»ҘеҗҺпјҢеҸ‘еұ•еҮәдәҶж— зәҝз”өйӣ·иҫҫжҠҖжңҜпјҢе®ғеңЁз¬¬дәҢж¬Ўдё–з•ҢеӨ§жҲҳдёӯеҙӯйңІй”ӢиҠ’пјҢеҸ‘жҢҘдәҶе·ЁеӨ§зҡ„дҪңз”ЁгҖӮеңЁйҡҸеҗҺзҡ„20е№ҙдёӯпјҢз”ұдәҺжҝҖе…үе’Ңе…үз”өеӯҗжҠҖжңҜзҡ„еҝ«йҖҹеҸ‘еұ•пјҢдҪҝеҫ—дәә们иғҪеӨҹжҠҠжҝҖе…үпјҢиҝҷдёӘзү№ж®Ҡзҡ„з”өзЈҒжіўеә”з”ЁдәҺйӣ·иҫҫпјҢеҸ‘еұ•жҲҗдёәжҝҖе…үйӣ·иҫҫгҖӮжҝҖе…үйӣ·иҫҫеңЁж–№еҗ‘жҖ§гҖҒзЁіе®ҡжҖ§гҖҒеҲҶиҫЁзҺҮе’ҢжҺўжөӢи·қзҰ»зӯүиҜёеӨҡж–№йқўйғҪжңүдәҶе·ЁеӨ§иҝӣжӯҘпјҢзҺ°еңЁе·Із»Ҹе№ҝжіӣең°иҝӣе…Ҙж°‘з”ҹйўҶеҹҹпјҢе°Өе…¶жҳҜжҷәиғҪзҪ‘иҒ”иҪҰгҖҒжҷәиғҪжңәеҷЁдәәгҖҒиҮӘеҠЁеҜјеј•иҪҰгҖҒиҷҡжӢҹзҺ°е®һгҖҒеўһејәзҺ°е®һзӯүзӯүпјҢеёӮеңәйқһеёёе№ҝйҳ”гҖӮ
дј з»ҹзҡ„жҝҖе…үйӣ·иҫҫз”ұж•°зӣ®еәһеӨ§зҡ„е…үеӯҰеҷЁд»¶з»„жҲҗпјҢдҪ“з§ҜеӨ§гҖҒжҲҗжң¬й«ҳгҖҒд»·ж јжҳӮиҙөгҖӮд»ҘVelodyneе…¬еҸёеһӢдёәHDL-64жҝҖе…үйӣ·иҫҫдёәдҫӢпјҢйҮҚйҮҸдёә15е…¬ж–ӨпјҢжҲҗжң¬й«ҳиҫҫе…«дёҮзҫҺе…ғгҖӮ
йҡҸзқҖзЎ…еҹәе…үз”өеӯҗйӣҶжҲҗжҠҖжңҜзҡ„иҝ…зҢӣеҸ‘еұ•пјҢзЎ…еҹәе…үеӯҗеӯҰжҠҖжңҜе·Іиў«е№ҝжіӣз ”з©¶пјҢеңЁдёҖдёӘиҠҜзүҮдёҠеҸҜд»ҘйӣҶжҲҗжҲҗеҚғдёҠдёҮдёӘе…үз”өеӯҗеҷЁд»¶пјҢжӯӨжҠҖжңҜйҖӮз”ЁдәҺеҲ¶дҪңжҝҖе…үйӣ·иҫҫзҡ„е…үеҸ‘е°„жЁЎеқ—пјҢз§°дёәе…үжҺ§зӣёжҺ§йҳөгҖӮеҲ©з”ЁзЎ…еҹәе…үз”өеӯҗйӣҶжҲҗжҠҖжңҜеҲ¶дҪңзҡ„е…үжҺ§зӣёжҺ§йҳөиҠҜзүҮпјҢе·ҘдҪңеңЁе…үйҖҡдҝЎжіўж®өпјҲ~1550 nmпјүпјҢзӣёжҜ”дј з»ҹзҡ„е·ҘдҪңеңЁеҸҜи§Ғе…үжіўж®өе’Ңиҝ‘зәўеӨ–жіўж®өзҡ„еҷЁд»¶жқҘиҜҙпјҢжӯӨе·ҘдҪңжіўж®өеҜ№дәәзңјжӣҙе®үе…ЁпјҢжңүеҲ©дәҺжҝҖе…үйӣ·иҫҫдә§е“Ғиҝӣе…Ҙж°‘з”ҹйўҶеҹҹгҖӮеҗҢж—¶з”ұдәҺзЎ…еҹәе…үз”өеӯҗжҠҖжңҜдёҺйӣҶжҲҗз”өи·ҜжҠҖжңҜе®Ңе…Ёе…је®№пјҢеҸҜеңЁеҚ•зүҮдёҠеҗҢж—¶йӣҶжҲҗе…үжқҹжү«жҸҸеҷЁд»¶е’ҢжҺ§еҲ¶йӣҶжҲҗз”өи·ҜпјҢжңүеҲ©дәҺе®һзҺ°жҷәиғҪеҢ–жҺ§еҲ¶е’ҢзҘһз»ҸзҪ‘з»ңйӣҶжҲҗзӯүгҖӮ
е…үжҺ§зӣёжҺ§йҳөзҡ„еҹәжң¬еҺҹзҗҶ
е…үжҺ§зӣёжҺ§йҳөеҹәжң¬еҺҹзҗҶеҰӮеӣҫ1жүҖзӨәпјҢе®ғжҳҜдёҖз§Қе…үжқҹжҢҮеҗ‘жҠҖжңҜгҖӮжҝҖе…үе…үжәҗз»ҸиҝҮе…үеҲҶжқҹеҷЁеҗҺиҝӣе…Ҙе…үжіўеҜјйҳөеҲ—пјҢеңЁжіўеҜјдёҠйҖҡиҝҮеӨ–еҠ жҺ§еҲ¶зҡ„ж–№ејҸж”№еҸҳе…үжіўзҡ„зӣёдҪҚпјҢеҲ©з”ЁжіўеҜјй—ҙзҡ„е…үжіўзӣёдҪҚе·®жқҘе®һзҺ°е…үжқҹжү«жҸҸпјҢе…¶еҺҹзҗҶзұ»дјјдәҺеӨҡзјқе№Іж¶үгҖӮ
е…үжіўеҜјйҳөеҲ—дёӯзҡ„жҜҸж №жіўеҜјйғҪзӣёеҪ“дәҺдёҖдёӘе…үеҸ‘е°„жәҗпјҢжҜҸдёӘе…үеҸ‘е°„жәҗйғҪзӣёеҪ“дәҺеӨҡзјқе№Іж¶үдёӯзҡ„зӢӯзјқгҖӮе…үеңЁз©әй—ҙдёӯдј ж’ӯ并干ж¶үпјҢе…¶з»“жһңжҳҜе…үеңЁжҹҗдёҖж–№еҗ‘дёҠеӣ е№Іж¶үеҠ ејәиҖҢйӣҶдёӯпјҢеңЁе…¶д»–ж–№еҗ‘дёҠеӣ е№Іж¶үзӣёж¶ҲиҖҢеҮҸејұпјҢд»ҺиҖҢж”№еҸҳе…үжқҹзҡ„дј ж’ӯж–№еҗ‘пјҢе®һзҺ°жү«жҸҸгҖӮ
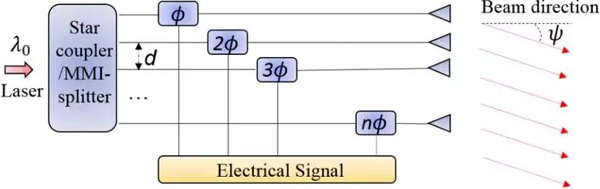
еӣҫ1гҖҒе…үжҺ§зӣёжҺ§йҳөжү«жҸҸеҹәжң¬еҺҹзҗҶзӨәж„Ҹеӣҫ
жҠҖжңҜиҝӣеұ•
зЎ…еҹәе…үз”өеӯҗйӣҶжҲҗе…үжҺ§зӣёжҺ§йҳөжңҖж—©еҸҜиҝҪжәҜеҲ°1997е№ҙпјҢзҫҺеӣҪеҠ еҲ©зҰҸе°јдәҡеӨ§еӯҰеңЁз»қзјҳдҪ“дёҠзЎ…жҷ¶зүҮдёҠеҲ¶дҪңдәҶжіўй•ҝеӨҡи·ҜеӨҚз”ЁеҷЁпјҢз”ЁйҳөеҲ—жіўеҜјз»“жһ„е®һзҺ°дәҶеҲ©з”Ёжіўй•ҝи°ғиҠӮе…үжқҹи§’еәҰзҡ„еҠҹиғҪгҖӮжӯӨеҗҺпјҢеҫ·е…ӢиҗЁж–Ҝе·һеӨ§еӯҰгҖҒеҠ е·һеӨ§еӯҰгҖҒйә»зңҒзҗҶе·ҘеӨ§еӯҰзӯүе…ҲеҗҺејҖеұ•дәҶе…ідәҺжӯӨйЎ№жҠҖжңҜзҡ„з ”з©¶гҖӮ
зӣёжҺ§йҳөзҡ„дёҖз»ҙжү«жҸҸдё»иҰҒеҲҶдёәдёӨз§Қж–№ејҸпјҡ
дёҖз§ҚдёәеҲ©з”Ёзғӯе…үзӣёдҪҚи°ғеҲ¶е®һзҺ°е…үжқҹжү«жҸҸпјҢиҝҷз§Қж–№жі•еҸӘйңҖиҰҒеҚ•иүІзҡ„жҝҖе…үжәҗпјҢжү«жҸҸи§’еәҰиҫғеӨ§пјҢзјәзӮ№жҳҜзүҮдёҠйңҖиҰҒйӣҶжҲҗз”өжһҒпјҢеӨҚжқӮеәҰеўһеҠ пјӣ
еҸҰдёҖз§ҚдёәеҲ©з”Ёжіўй•ҝе®һзҺ°е…үжқҹжү«жҸҸпјҢиҝҷз§Қж–№жі•йңҖиҰҒеҸҜи°ғи°җзҡ„жҝҖе…үжәҗпјҢжү«жҸҸи§’еәҰиҫғе°ҸгҖӮ
жӯӨеҗҺпјҢз»“еҗҲдёҠиҝ°зҡ„дёӨз§Қж–№жі•пјҢеҗ„жңәжһ„е…ҲеҗҺжҠҘйҒ“дәҶжҖ§иғҪеҗ„ејӮзҡ„дәҢз»ҙжү«жҸҸзӣёжҺ§йҳөпјҢе…¶дёӯе…·жңүд»ЈиЎЁжҖ§зҡ„дёәд»ҘдёӢжүҖиҝ°гҖӮ
2013е№ҙпјҢзҫҺеӣҪйә»зңҒзҗҶе·ҘеӯҰйҷўе°Ҷ4096(64×64 )дёӘе…үж …еҸ‘е°„еӨ©зәҝйӣҶжҲҗеңЁдёҖеқ—SOIиҠҜзүҮдёҠпјҢеӣҫ2(a)дёәеӨ§и§„жЁЎзәізұіе…үжҺ§зӣёжҺ§йҳөзӨәж„ҸеӣҫпјҢжҸ’еӣҫдёәеҚ•дёӘеӨ©зәҝзҡ„зү№еҶҷпјҢжҜҸдёӘжіўеҜјеӨ©зәҝзҡ„е°әеҜёдёә9 μm×9 μmгҖӮеӣҫ2 (b )дёәйғЁеҲҶз»“жһ„зҡ„з”өеӯҗжҳҫеҫ®й•ңз…§зүҮпјҢеӣҫ2(c)дёәеҚ•дёӘеӨ©зәҝзҡ„з”өеӯҗжҳҫеҫ®й•ңз…§зүҮгҖӮе°ҒиЈ…еҗҺж•ҙдҪ“иҠҜзүҮе°әеҜёдёә576 μm ×576 μmгҖӮеҜ№йҮҮз”ЁжӯӨз§Қз»“жһ„8×8еӨ§е°Ҹзҡ„з»„еҗҲиҝӣиЎҢжөӢйҮҸпјҢжіўй•ҝдёә1550 nmзҡ„жҝҖе…үжәҗиҖҰеҗҲеҲ°е·ҘдҪңзҡ„жҖ»зәҝжіўеҜјдёҠпјҢе…үеҠҹзҺҮеңЁзәізұіеӨ©зәҝдёӯеқҮеҢҖеҲҶеёғпјҢеөҢе…ҘејҸзҡ„зӣёдҪҚи°ғи°җдҪҝеҫ—дёҚеҗҢжЁЎеқ—д№Ӣй—ҙзҡ„е…үдә’зӣёз»“еҗҲеҗҺдә§з”ҹдёҖдёӘжңҹжңӣзҡ„иҝңеңәиҫҗе°„жЁЎејҸпјҢжӯӨиҝңеңәиҫҗе°„жЁЎејҸеҸҜд»Ҙж №жҚ®дёҚеҗҢиҰҒжұӮеҠЁжҖҒеҸҳеҢ–гҖӮ

еӣҫ2гҖҒ(a)еӨ§и§„жЁЎзәізұіе…үжҺ§зӣёжҺ§йҳөзӨәж„ҸеӣҫпјҢжҸ’еӣҫдёәеҚ•дёӘеӨ©зәҝзҡ„зү№еҶҷпјӣ(b)йғЁеҲҶз»“жһ„зҡ„з”өеӯҗжҳҫеҫ®й•ң(SEM)еӣҫпјӣ(c)еҚ•дёӘеӨ©зәҝзҡ„з”өеӯҗжҳҫеҫ®й•ңз…§зүҮпјӣ
2015е№ҙзҫҺеӣҪеҠ еҲ©зҰҸе°јдәҡеӨ§еӯҰеңЁеҚ•зүҮдёҠйӣҶжҲҗеҢ…жӢ¬жҝҖе…үе…үжәҗгҖҒе…үз”өдәҢжһҒз®ЎгҖҒзӣёдҪҚи°ғи°җеҷЁгҖҒе…үж …иҖҰеҗҲеҷЁгҖҒеҠҹзҺҮеҲҶжқҹеҷЁзӯүеңЁеҶ…е…ұ9з§Қ164дёӘе…үеӯҰе…ғ件пјҢеӣҫ3жүҖзӨәдёәжӯӨе·ҘдҪңдёӯе…ЁйӣҶжҲҗзҡ„еҚ•зүҮе…үжҺ§зӣёжҺ§йҳөиҠҜзүҮгҖӮе…¶дёӯе…ұжңүдёӨеӨ„дҪҝз”ЁдәҶе…үж”ҫеӨ§еҷЁпјҢеҲҶеҲ«жҳҜдҪҚдәҺжҝҖе…үжәҗд№ӢеҗҺеҲҶжқҹеҷЁд№ӢеүҚгҖҒй•ҝеәҰдёә1.5 mmзҡ„еүҚзҪ®е…үж”ҫеӨ§еҷЁпјҢе’ҢзӣёдҪҚи°ғеҲ¶жіўеҜјд№ӢеҗҺиҖҰеҗҲе…үж …д№ӢеүҚгҖҒй•ҝеәҰдёә3 mmзҡ„е…үж”ҫеӨ§еҷЁгҖӮдёӨеӨ„ж”ҫеӨ§еҷЁзҡ„дҪҝз”ЁпјҢеңЁдёҖе®ҡзЁӢеәҰдёҠе…ӢжңҚдәҶз”ұдәҺзүҮдёҠжҝҖе…үе…үжәҗеҠҹзҺҮиҫғе°ҸжүҖеёҰжқҘзҡ„жҺўжөӢи·қзҰ»иҫғзҹӯзҡ„й—®йўҳгҖӮ
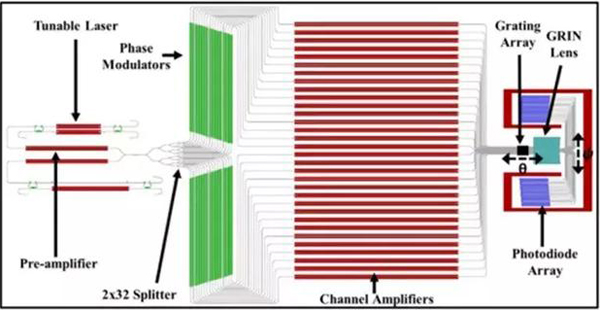
еӣҫ3гҖҒе…ЁйӣҶжҲҗе…үжҺ§зӣёжҺ§йҳөзӨәж„Ҹеӣҫ
2016е№ҙпјҢIntelе®һйӘҢе®ӨжҠҘйҒ“дәҶеҰӮеӣҫ4жүҖзӨәзҡ„йқһеқҮеҢҖеёғеұҖе…үжҺ§зӣёжҺ§йҳөгҖӮйҮҮз”ЁжҳҹеҪўиҖҰеҗҲеҷЁеҲҶе…үиҝӣе…Ҙ128ж №жіўеҜјпјҢз”Ёзғӯе…үж•Ҳеә”и°ғиҠӮзӣёдҪҚпјҢжіўеҜјд№Ӣй—ҙзҡ„й—ҙи·қз”ұи®Ўз®—жңәжЁЎжӢҹдјҳеҢ–еҫ—еҲ°пјҢеҸҜд»Ҙжңүж•Ҳең°жҠ‘еҲ¶ж—Ғз“ЈгҖӮжөӢйҮҸеҫ—еҲ°жЁӘеҗ‘жү«жҸҸи§’еәҰиҫҫеҲ°дәҶ80°гҖӮе…үжқҹзҡ„еҸ‘ж•Ји§’еҫҲе°ҸпјҢе№іеқҮеҸӘжңү0.14°пјҢзәөеҗ‘жү«жҸҸеҲ©з”Ёжіўй•ҝи°ғи°җе®һзҺ°пјҢзәөеҗ‘жү«жҸҸи§’еәҰдёә17°гҖӮеңЁдәҢз»ҙжү«жҸҸзҡ„ж•ҙдёӘиҢғеӣҙдёӯпјҢжңүиҝ‘дјј60000дёӘеҸҜеҲҶиҫЁзҡ„зӮ№гҖӮ
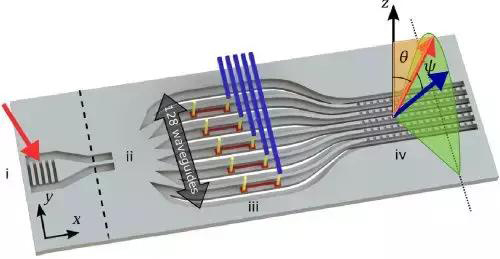
еӣҫ4гҖҒIntelйқһеқҮеҢҖеёғеұҖе…үжҺ§зӣёжҺ§йҳөз»“жһ„зӨәж„Ҹеӣҫ
2017е№ҙзҫҺеӣҪйә»зңҒзҗҶе·ҘеҲ¶дҪңдәҶе…үжҺ§зӣёжҺ§йҳө并且жһ„е»әдәҶжҝҖе…үйӣ·иҫҫзі»з»ҹгҖӮзі»з»ҹзҡ„жҖ»дҪ“и®ҫи®Ўж–№жЎҲеҰӮеӣҫ5гҖӮеҸ‘е°„з«ҜйҮҮз”Ёи°ғйў‘иҝһз»ӯе…үпјҢжҺҘ收з«ҜйҮҮз”Ёй”—жқҗж–ҷпјҢйҖҡиҝҮдә§з”ҹйў‘зҺҮдёҚеҗҢзҡ„жң¬ең°жӢҚйў‘е’ҢжҺҘ收еҲ°зҡ„дҝЎеҸ·ж··йў‘е®һзҺ°зӣёе№ІжҺўжөӢгҖӮйҮҮз”Ёдёүи§’жөӢйҮҸзҡ„ж–№жі•пјҢеҜ№иҝңиҝ‘дёҚеҗҢзҡ„дёүдёӘзӣ®ж ҮиҝӣиЎҢдәҶи·қзҰ»жөӢйҮҸпјҢжҺўжөӢи·қзҰ»дёә2 mпјҢжөӢи·қеҲҶиҫЁзҺҮдёә20 mmпјҢйҰ–ж¬Ўе®һзҺ°дәҶе…ЁеӣәжҖҒзӣёе№ІжЁЎејҸдёӢзҡ„е…үжҺўжөӢе’ҢжөӢи·қгҖӮ
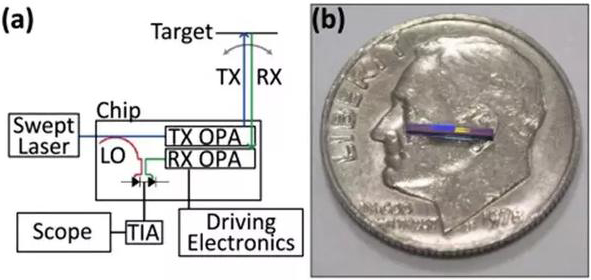
еӣҫ5гҖҒйә»зңҒзҗҶе·ҘеӯҰйҷўе…ЁеӣәжҖҒжҝҖе…үйӣ·иҫҫз»“жһ„зӨәж„ҸеӣҫпјҲaпјүдёҺе®һзү©з…§зүҮпјҲbпјү
еә”з”ЁжӯЈеңЁи·ҜдёҠ
еңЁжҝҖе…үйӣ·иҫҫд№ӢеүҚпјҢжұҪиҪҰйӣ¶йғЁд»¶дҫӣеә”е•Ҷ们еёғеұҖжӣҙеӨҡзҡ„жҳҜжҜ«зұіжіўйӣ·иҫҫпјҢеңЁдҝЎжҒҜйў—зІ’еәҰиҰҒжұӮдёҚжҳҜеӨӘй«ҳзҡ„иҫ…еҠ©й©ҫ驶дёӯпјҢжҜ«зұіжіўйӣ·иҫҫдҪҝз”Ёиҫғе№ҝжіӣгҖӮиҮӘеҠЁй©ҫ驶дёҺжҝҖе…үйӣ·иҫҫејҖе§Ӣе…ҙиө·иҝҮеҗҺпјҢеңЁжҜ«зұіжіўйӣ·иҫҫеёӮеңәдёҠеҚ жҚ®дё»еҠЁжқғзҡ„е…¬еҸёеқҮејҖе§ӢдәҶжҝҖе…үйӣ·иҫҫеёӮеңәзҡ„дәүеӨәпјҢ并且пјҢ他们зһ„еҮҶзҡ„ж— дёҖдҫӢеӨ–жҳҜеӣәжҖҒжҝҖе…үйӣ·иҫҫгҖӮ
з”ұдәҺеӣәжҖҒжҝҖе…үйӣ·иҫҫжҠҖжңҜеӨӘж–°пјҢжұҪиҪҰйӣ¶йғЁд»¶йҖҡеёёйҖүжӢ©жҠ•иө„жҲ–并иҙӯжңүж–°жҠҖжңҜзҡ„е…¬еҸёпјҢиҝҷдәӣж–°е…ҙе…¬еҸёдё»иҰҒеҢ…жӢ¬FotonicпјҢAdvanced Scientific ConceptsпјҢLeddar TechпјҢInnovizпјҢPioneerпјҢInnovisionзӯүгҖӮиҖҢеңЁдј з»ҹжңәжў°йӣ·иҫҫйўҶеҹҹеҚ жңүз»қеҜ№дјҳеҠҝзҡ„VelodyneпјҢеңЁжҺЁеҮәж··еҗҲеӣәжҖҒжҝҖе…үйӣ·иҫҫVelarrayеҗҺпјҢд№ҹе®ЈеёғжӯЈејҸејҖеұ•е…ЁеӣәжҖҒжҝҖе…үйӣ·иҫҫзҡ„з ”з©¶гҖӮ
еңЁе…ЁеӣәжҖҒжҝҖе…үйӣ·иҫҫйўҶеҹҹпјҢзӣ®еүҚе®Јеёғе·Іжңүзӣёе…іжҠҖжңҜдёҺж ·е“ҒпјҢжӯЈеңЁжҠ•е…Ҙз”ҹдә§зҡ„е…¬еҸёдё»иҰҒжңүQuanergyпјҢIbeoпјҢInnovizзӯүгҖӮе…ідәҺдә§е“ҒдёӯйҮҮз”Ёзҡ„жҠҖжңҜз»ҶиҠӮпјҢе…¬еҸёж–№еқҮжңӘе…·дҪ“йҖҸйңІгҖӮ
е°Ҫз®ЎзҺ°д»ҠиҪҰиҪҪжҝҖе…үйӣ·иҫҫзҡ„дё»жөҒд»Қ然жҳҜжңәжў°ејҸжҝҖе…үйӣ·иҫҫпјҢдҪҶд»Һй•ҝиҝңиҖҢиЁҖпјҢе®ғз»Ҳ究йҡҫд»Ҙж»Ўи¶іиҮӘеҠЁй©ҫ驶жҷ®еҸҠжҸҗеҮәзҡ„еӨ§и§„жЁЎгҖҒдҪҺжҲҗжң¬гҖҒиҪҰ规зә§йңҖжұӮгҖӮеӣ жӯӨпјҢеӣәжҖҒжҝҖе…үйӣ·иҫҫйЎәзҗҶжҲҗз« ең°жҺҘиҝҮдәҶиҝҷдёҖжЈ’пјҢжҲҗдёәдәҶиҪҰиҪҪжҝҖе…үйӣ·иҫҫзҡ„дёӢдёҖдёӘеҸ‘еұ•еҪўжҖҒпјҢе…¶дёӯзҡ„е…ій”®жҠҖжңҜ——е…үжҺ§зӣёжҺ§йҳөжҠҖжңҜе°Ҷеҫ—еҲ°еӨ§еҠӣеҸ‘еұ•гҖӮ
е®һз”ЁеҢ–йқўдёҙзҡ„й—®йўҳ
зӣ®еүҚзЎ…еҹәе…үз”өеӯҗйӣҶжҲҗе…үжҺ§зӣёжҺ§йҳөеә”з”ЁеҲ°жҝҖе…үйӣ·иҫҫиҝҳйңҖиҰҒи§ЈеҶід»ҘдёӢй—®йўҳпјҡ
1гҖҒжү«жҸҸи§’еәҰ
зӣ®еүҚзЎ…еҹәе…үз”өеӯҗйӣҶжҲҗе…үжҺ§зӣёжҺ§йҳөзҡ„жЁӘеҗ‘жү«жҸҸи§’еәҰжңҖеӨ§дёә80°пјҢеҜ№дәҺиҮӘеҠЁй©ҫ驶жұҪиҪҰжқҘиҜҙпјҢжЁӘеҗ‘жү«жҸҸи§’еәҰйңҖиҰҒиҫҫеҲ°120°гҖӮйңҖиҰҒз ”з©¶еҰӮдҪ•иҝӣдёҖжӯҘеўһеҠ жү«жҸҸи§’еәҰиҢғеӣҙгҖӮ
2гҖҒж …з“Ј
еҜ№дәҺжіўеҜјй—ҙи·қзӣёеҗҢзҡ„е…үжҺ§зӣёжҺ§йҳөз»“жһ„пјҢжіўеҜјй—ҙи·қдёҚеҸҜд»ҘеӨӘиҝ‘пјҢеҗҰеҲҷдјҡеҸ‘з”ҹе…үжіўеңЁжіўеҜјд№Ӣй—ҙзҡ„дёІжү°гҖӮеҪ“еҷЁд»¶е°әеҜёиҝҮе°Ҹж—¶пјҢз”өжһҒд№Ӣй—ҙзҡ„и·қзҰ»д№ҹйҡҸд№ӢеҸҳе°ҸпјҢз”өеңәдҪңз”Ёдјҡйқһеёёжҳҫи‘—пјҢд»ҺиҖҢеҪұе“ҚеҷЁд»¶зҡ„иҙЁйҮҸгҖӮдҪҶжіўеҜјй—ҙи·қеӨ§дәҺдәҢеҲҶд№ӢдёҖжіўй•ҝпјҢеҸҲдјҡеҮәзҺ°ж …з“ЈпјҢж …з“ЈдјҡеҲҶж•ЈжҝҖе…үиғҪйҮҸ并йҖ жҲҗе№Іжү°гҖӮйҖҡиҝҮз ”з©¶иЎЁжҳҺпјҢйқһзӯүй—ҙи·қзҡ„жіўеҜјеҲҶеёғеҸҜд»Ҙжңүж•Ҳзҡ„жҠ‘еҲ¶ж …з“ЈпјҢ并且дҝқиҜҒи¶іеӨҹе°Ҹзҡ„жіўжқҹи§’пјҢжіўеҜјй—ҙи·қеҸҜд»ҘжҜ”иҫғеӨ§гҖӮ
3гҖҒжҺўжөӢи·қзҰ»
жҝҖе…үеңЁдј ж’ӯзҡ„иҝҮзЁӢдёӯпјҢдјҡдёҺеӨ§ж°”дёӯзҡ„еҲҶеӯҗе’Ңеҫ®зІ’д»ҘеҸҠжҺўжөӢзү©дҪ“иЎЁйқўеҸ‘з”ҹдҪңз”ЁпјҢдә§з”ҹеҗёж”¶гҖҒж•Је°„гҖҒеҸҚе°„гҖҒжј«е°„гҖҒжҠҳе°„е’ҢиЎҚе°„зӯүзҺ°иұЎпјҢеӣһжіўжҝҖе…үдҝЎеҸ·еҫҖеҫҖйқһеёёејұгҖӮиҰҒдҝқиҜҒдёҖе®ҡзҡ„жҺўжөӢи·қзҰ»пјҢйңҖиҰҒжҝҖе…үзҡ„иғҪйҮҸи¶іеӨҹеӨ§пјҢе’ҢжҺўжөӢеҷЁзҡ„зҒөж•ҸеәҰи¶іеӨҹй«ҳгҖӮйңҖиҰҒз ”з©¶еҰӮдҪ•йҷҚдҪҺе…үжҺ§зӣёжҺ§йҳөиҠҜзүҮзҡ„жҚҹиҖ—пјҢд»ҘиҺ·еҫ—е°ҪеҸҜиғҪеӨ§зҡ„жҝҖе…үиҫ“еҮәгҖӮ
4гҖҒжү«жҸҸзІҫеәҰ
жү«жҸҸзІҫеәҰдёҺе…үжҺ§зӣёжҺ§йҳөзҡ„иҝңеңәе…үж–‘еӨ§е°Ҹжңүе…ігҖӮдј з»ҹзҡ„еҚ•жҷ¶зЎ…жіўеҜјз»“жһ„зҙ§еҮ‘гҖҒдҪ“з§Ҝе°ҸгҖҒзғӯе…үзі»ж•°еӨ§гҖҒи°ғиҠӮзӣёдҪҚиҫғдёәе®№жҳ“пјҢдҪҶжҳҜеҠ е·ҘиҜҜе·®зҡ„е®№еҝҚеәҰиҫғе°ҸпјҢдёҚеҲ©дәҺе®һзҺ°зӣёдҪҚзҡ„зІҫзЎ®жҺ§еҲ¶гҖӮиҖҢд»Ҙж°®еҢ–зЎ…дёәжқҗж–ҷзҡ„жіўеҜјдҪ“з§ҜиҫғеӨ§гҖҒзғӯе…үзі»ж•°е°ҸгҖҒе·ҘдҪңз”өеҺӢй«ҳпјҢдҪҶжҚҹиҖ—е°ҸгҖҒеҠ е·ҘиҜҜе·®е®№еҝҚеәҰиҫғеӨ§пјҢжңүеҲ©дәҺе®һзҺ°зӣёдҪҚзҡ„зІҫзЎ®и°ғжҺ§гҖӮеңЁдёҚиҖғиҷ‘еҷЁд»¶е°әеҜёзҡ„жғ…еҶөдёӢпјҢеҲ©з”Ёж°®еҢ–зЎ…жіўеҜјеҲ¶дҪңе…үжҺ§зӣёжҺ§йҳөжңүеҲ©дәҺжҸҗй«ҳжү«жҸҸзІҫеәҰгҖӮ
5гҖҒеҠ е·Ҙе·Ҙиүә
й«ҳйӣҶжҲҗеәҰзҡ„иҠҜзүҮејҸзӣёжҺ§йҳөжҝҖе…үйӣ·иҫҫеҜ№еҲ¶дҪңе·ҘиүәжҸҗеҮәжӣҙй«ҳзҡ„иҰҒжұӮгҖӮдёәдәҶдҪҝеҫ—жіўеҜјд№Ӣй—ҙеҸҜд»Ҙе®һзҺ°зӣёдҪҚе№Іж¶үпјҢеҗ„жіўеҜјд№Ӣй—ҙйңҖиҰҒжңүеӣәе®ҡзҡ„зӣёдҪҚе·®гҖӮеҰӮжһңз”ұеҠ е·ҘиҜҜе·®еҜјиҮҙжіўеҜјдёҠжңүйҡҸжңәзӣёдҪҚпјҢиҝҷе°ҶеҜ№жҝҖе…үйӣ·иҫҫзҡ„е…үжқҹиҙЁйҮҸдә§з”ҹеҫҲеқҸзҡ„еҪұе“ҚгҖӮйңҖиҰҒз ”з©¶еҠ е·Ҙе·ҘиүәжҠҖжңҜпјҢе°ҪеҸҜиғҪдҪҝе…үжіўеҜјйҳөеҲ—е…·жңүжңҖеҘҪзҡ„еқҮеҢҖжҖ§е’ҢдёҖиҮҙжҖ§гҖӮ
еұ•жңӣ
зЎ…еҹәе…үз”өеӯҗжҠҖжңҜеҮӯеҖҹжҲҗзҶҹзҡ„CMOSе·ҘиүәпјҢеҸҜд»Ҙе®һзҺ°й«ҳзІҫеәҰзҡ„еҠ е·Ҙе’ҢеӨ§и§„жЁЎзҡ„з”ҹдә§гҖӮзЎ…еҹәе…үз”өеӯҗжҠҖжңҜеҸҠеӣҫеғҸеӨ„зҗҶз®—жі•зӯү科жҠҖзҡ„дёҚж–ӯиҝӣжӯҘпјҢе»үд»·зҡ„иҠҜзүҮејҸе…ЁеӣәжҖҒжҝҖе…үйӣ·иҫҫдёҚд№…е°Ҷдјҡиҝӣе…Ҙдәә们зҡ„ж—Ҙеёёз”ҹжҙ»еҪ“дёӯгҖӮ
еҸӮиҖғж–ҮзҢ®
еә„дёңзӮң,йҹ©жҷ“е·қ,жқҺйӣЁиҪ©,е®ӢдҝҠеі° зЎ…еҹәе…үз”өеӯҗйӣҶжҲҗе…үжҺ§зӣёжҺ§йҳөзҡ„з ”з©¶иҝӣеұ•[J]. жҝҖе…үдёҺе…үз”өеӯҗеӯҰиҝӣеұ•, 2018, 55(5): 50001
е°ҒйқўеӣҫжқҘжәҗпјҡжҝҖе…үдёҺе…үз”өеӯҗеӯҰиҝӣеұ•
 зІӨе…¬зҪ‘е®үеӨҮ 44030902003195еҸ·
зІӨе…¬зҪ‘е®үеӨҮ 44030902003195еҸ·